
Many OxTS units have a digital I/O port that allows customers to relay or sync to events of interest. The article covers the following features of the port:
- 1PPS output
- Event input
- Wheel speed input
- Wheel speed output
- IMU sync output pulse
- Ground (0 V) reference
Hardware overview
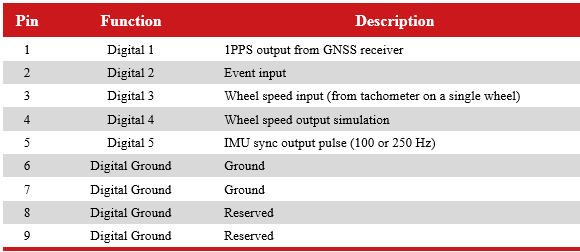
The default pin out of the port is:
1PPS Output
Main facts
- The 1PPS is a TTL pulse direct from the GNSS receiver
- The falling edge of the pulse is the exact transition from one second to the next in GNSS time
- On RT2500 and RT2502 products the 1PPS is only output when the GNSS has a valid position mode
- With RT2002, RT3000, RT4000 products the 1PPS will always be output after a GNSS lock has been achieved once
- The pulse is low for 1 ms, then high for 999 ms and repeats every second
- The output is a low-voltage CMOS output (0.8 V or less is low and 2.4 V is high)
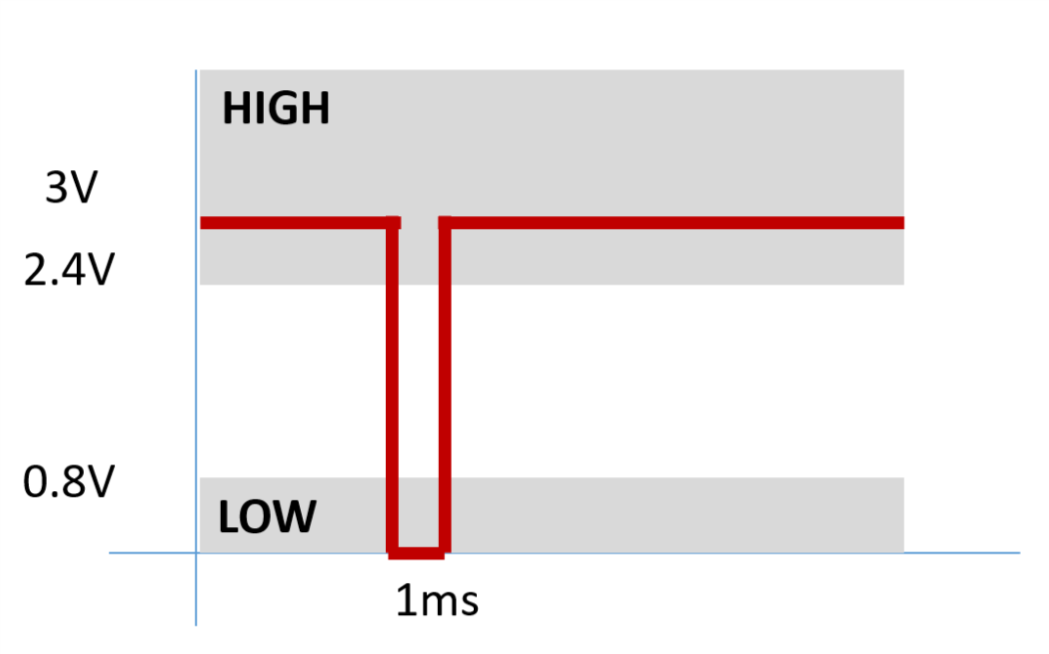
- NOTE: Voltage output is 5V for RT2000/2500/3000/4000, Inertial+ and Survey+ systems and 3v3 for RT1000 and all xNAV/xOEM systems
The outputs of the system are in sync with this signal, so if you were to line them up you would have something like this:
WARNING: No more than 10 mA should be drawn from this output.
Event input
The event input can be used to time events, like the shutter of a camera or a brake switch. The event input has a pull-up resistor so it can be used with a switch or as a CMOS input. The input sees less than 0.8 V as low and more than 2.4 V as high. There is no protection on this input (protection circuitry would disturb the accuracy of the timing). Keep the input in the range of 0 V to 5 V.
By default the maximum event rate is 1 Hz for 100 Hz products and 4 Hz for 250 Hz products. This can be increased to 50 Hz by selecting one or both the Output on falling edge of trigger and Output on rising edge of trigger check boxes on the Ethernet Output window. This is accessed from the Options page in NAVconfig.
Trigger information can be found in status message 24 and 43 (output over NCOM and CAN) for the low-rate triggers. The fast trigger information can only be output over NCOM.
Wheel speed input
The wheel speed input accepts TTL pulses from an encoder on a single wheel. An encoder from a gearbox should not be used, and simulated TTL pulses (e.g. from the CAN bus) should not be used. The timing of the wheel speed input pulses is critical and nothing should cause any delay in the wheel speed input pulses.
The wheel speed input requires less than 0.8 V for a low pulse and more than 2.4 V for a high pulse. Limited protection is provided on this port, however the input voltage should not exceed 12 V.
The wheel that is used should not steer the vehicle. The RT will assume this wheel travels straight.
Wheel speed output
The wheel speed output generates pulses in the same way as a wheel encoder would. The configuration software can change the number of pulses per metre of travel. The output has 0.8 V or less for a low and 2.4 V or more for a high. There is no protection on this output, no more than 10 mA should be used on this output.
IMU sync output pulse
The IMU (inertial measurement unit) sync output pulse is a 100 Hz or 250 Hz output pulse synchronised to the IMU sample time. The output has a duty cycle of approximately 50% and the falling edge is synchronised to the sample time of the data from the IMU.
The IMU is already synchronised to GPS time so one of the pulses each second will line up with the 1PPS output. This allows other systems to sample based on the timing of the RT.
Comments
0 comments
Please sign in to leave a comment.