
This article will guide users through how to setup and use the RT-Range equipment to monitor the movements of the cab and trailer of a truck.
If you are using RT3000 v.3s, you will need:
- V2V & V2L feature codes to unlock the RT-Range functionality of your RT in the cab.
- V2L feature code for the RT in the trailer (if you require lane measurements from both cab and trailer).
- Survey Trolley
- 2 x RT-XLANs (or Ethernet cable if you are able to run it between the cab and trailer).
- RT-Base S (or alternative source of differential corrections e.g. NTRIP subscription).
If you are using RT3000 v.2s, you will need:
- RT-Range S Hunter
- RT-Range S Target (or another Hunter if you require lane measurements from both cab and trailer).
- RT3003
- Survey Trolley (if you require any lane measurements).
- 2 x RT-XLANs (or Ethernet cable if you are able to run it between the cab and trailer).
- RT-Base S (or alternative source of differential corrections e.g. NTRIP subscription).
- Position
- Orientation
- Velocity
- Acceleration
- Fixed points measurements
- Polygon measurements
- Time to Collision measurements
- Feature points measurements
- Lane measurements
For the topic, special points of interest would be to see the relative movements between cab and trailer, and also the lane measurements from both cab and trailer. All above can be covered in range measurements, except that there is no direct output of the relative heading of cab and trailer, but a simple subtraction in post processing can do the trick.
Base station
Setup the base station in a safe location, ensuring that the GNSS antenna has an unobstructed view of as much of the sky as possible i.e. down to the horizon.
If you are wanting to test over multiple days and compare data sets it is recommended that you use the same GNSS antenna location and load the position of the antenna into the base station instead of allowing it to average it's position.
Install RT and RT-Range
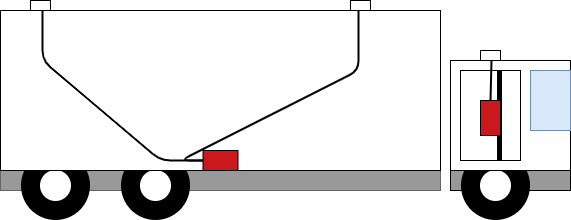
Physically install the RT Strut into the vehicle and mount an RT and Range (Hunter) system on the strut. It is possible that for some trailers with significant height, our strut will not be long enough to hold its position. In such case, we recommand to screw the units on to the floor of the trailer. For reference here is the mounting solution we used during testing.
 Choose suitable GNSS antenna locations, ensuring that the antennas are at least 20 cm from the edge of the vehicle's roof and are mounted on a metallic surface.
Choose suitable GNSS antenna locations, ensuring that the antennas are at least 20 cm from the edge of the vehicle's roof and are mounted on a metallic surface.Be sure to place the XLAN and the shortwave radio antennas in positions that do not obstruct the GNSS antennas view of the sky.
Ensure all the appropriate connections have been made including antennas, radio, Ethernet and power.
Repeat this for the any target vehicles.
- In the "Lane Survey" wizard line - type in the name of the folder where you wish to save the lane file in, and add the name of the first file generated. (The best option is "Line1". The system will automatically add the .rtrl extension to the file's name)
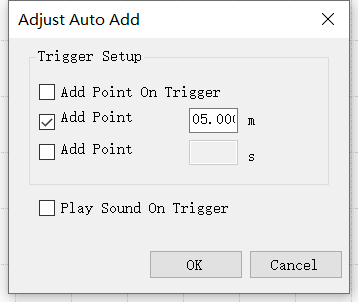
- Click on the "Add point" button and select the suitable option. Click "OK". (You can manually add point, or choose Auto Add which would automatically add points base on a certain distance or time period)
- Now start surveying, moving the trolley right on the line you want to save into your file
- Once you have completed the survey of the first line, switch "Add point" to "OFF". Then click the "Finish Options" button and click "Save and start new line". This will save the data of the first line into Line1.rtrl, then the system will automatically create the Line2.rtrl file where the points of the second line will be saved
- Configure all RTs with local coordinates enabled, and receiving differential corrections from a base station/NTRIP service, then warm up RTs as per the current warm up process.
- Configure RT-Range – (RT-Range real-time display> ‘Configure RT-Range’)
- Start by using default settings (unless you already have a config to read)
- Set IP address of hunter and output rate (normally 100 Hz)
- Set number of targets as 1, then choose “Mobile target”
- If lane measurements are needed, configure measurement points in 'Car Lane Measurements' page
- In 'Car Range Measurements' page, configure the polygons for both cab and trailer base on the true measurements of each.Hunter/Targets Setup
- Open up a real time display page and open a saved template showing longitudinal and lateral range to each of the targets and add any other measurements that you would like to see displayed. (ref RT-Range manual)
- When both Cab and trailer need lane measurements:
-
- Install RTs with Hunter function in both Cab & Trailer
- For the RT in the cab, configure the RT as Hunter and the trailer as target
-For the RT in the trailer, configure the RT as Hunter and the cab as target
-
Open up a real time display page and open a saved template showing longitudinal and lateral range to the target and add any other measurements that you would like to see displayed.
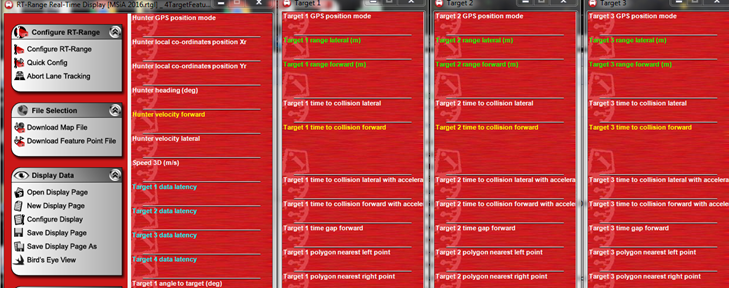
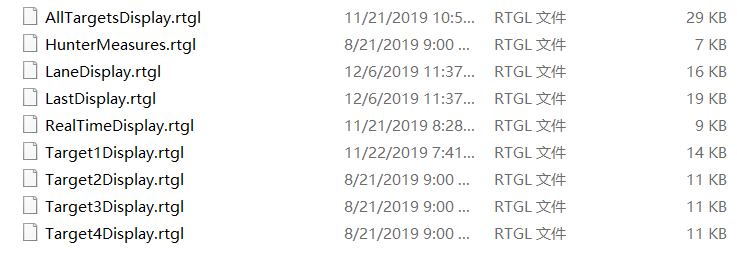
Also, in the 'Open Display Page' option, there will be several display templates for the ease of use. (ref RT-Range manual)
Some specific measurements
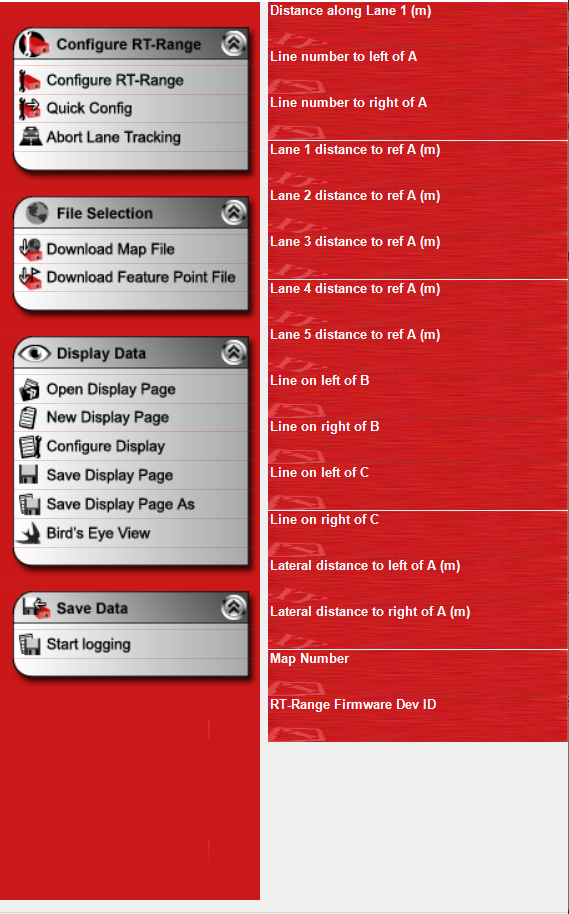
- Lane measurements: these measurements are important for those who are interested in LKA test. In the 'Open Display Page' option, select LaneDisplay.rtgl file then you will see the template below. (ref RT-Range manual)
- Relative heading calculation: As mentioned above, relative heading needs to be calculated in post processing after exporting test data, but it is very simple.
Open the exported .CSV file in a spreadsheet, find the heading measurements for Hunter1 and Hunter2(Cab & Trailer), then apply a subtraction formula to both columns.
Monitor the test in RT-Range Real-Time Display
Select ‘Birds eye view’ from the RT-Range real-time display main page, click on “origin view” tab, and you shall see the two polygons of cab and trailer in real time.
In order to see all of the image, you might need to adjust some settings by clicking on the “spanner” icon and enabling ‘Show polygon point numbers’ and ‘Highlight closest polygon point’
Comments
0 comments
Please sign in to leave a comment.