
Introduction
Locata produce a system that is a “local ground-based replica” of GPS-style positioning. The system utilises a network of small, ground-based transmitters (LocataNet) covering a chosen area with strong radio positioning signals, from which receivers can determine their position. Integration of this technology with the Inertial+ has been available since 2015 and now in 2018, this capability is made available on the RT1003.
Integration
Hardware
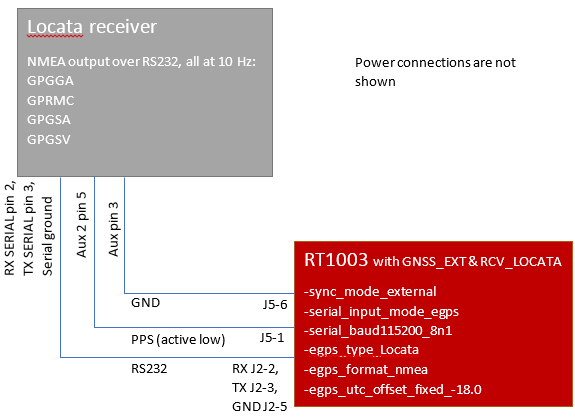
The Locata receiver should be configured to output the following NMEA sentences at 10 Hz over a serial port set to 115200 baud, 8 data bits, no parity and 1 stop bit:
- GPGGA
- GPRMC
- GPGSA
- GPGSV
These four NMEA sentences are passed to the RT1003 through an RS232 null modem cable. To permit synchronisation of the RT1003 with the Locata infrastructure, it is necessary to connect the PPS signal from the Locata receiver to the PPS pin of the RT1003 (pin 1 of J5), ensuring that the PPS output from the RT1003 has first been disabled by the command -sync_mode_external. A ground connection between the Locata receiver and ground of the RT1003 digital IO (pins 6 to 9 of J5) is also required to give a reference level for the PPS signal.
Firmware and feature codes
The version of xbns firmware required to allow the RT1003 to operate with the Locata receiver is 180604x1, or any later firmware version.
Feature codes for external GNSS input (GNSS_EXT) and Locata receiver input (RECV_LOCATA) must also be added to the RT1003 to allow it to operate with the Locata receiver (please contact our Sales team if you wish to add this capability).
As there is currently no provision in NAVconfig for configuration of external receivers with the RT1003, this integration requires a number of commands to be entered in the Advanced window on the Options page of NAVconfig (see below).
-sync_mode_external
-serial_input_mode_egps
-serial_baud115200_8n1
-egps_type_Locata
-egps_format_nmea
-egps_utc_offset_fixed_-18.0
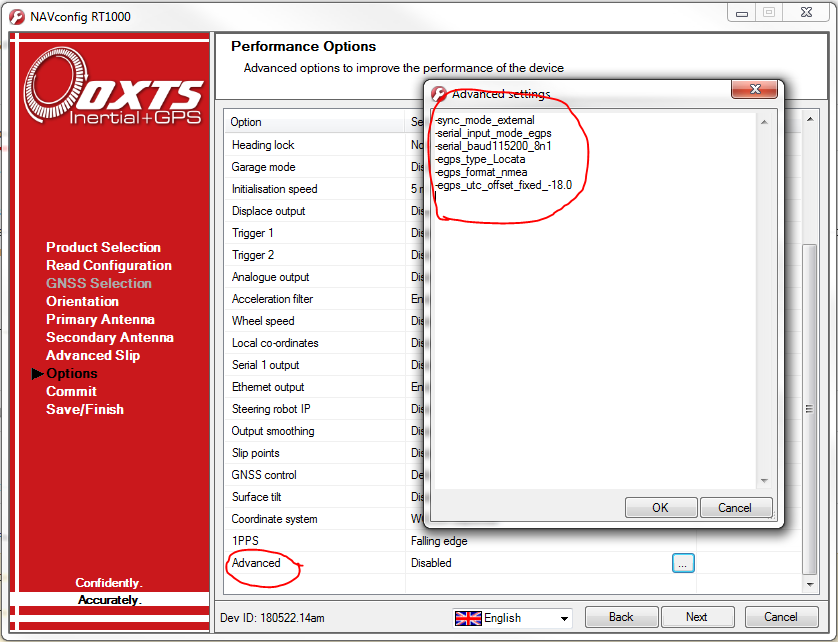
The last of these commands that sets the GPS to UTC time offset must be set according to the current offset (-18 seconds when this article was written in 2018).
These connections and settings are reflected in the block diagram below.
Troubleshooting
The RT1003 will not initialise
- Check that the advanced commands for the RT1003 have been entered correctly, especially the one setting the UTC offset.
- Check (in NAVdisplay - Utilities - Device Status) that the required feature codes for 'External GNSS input' and 'Locata receiver input' have been applied (NB This is not a standard feature, so please contact our Sales team if you wish to add this capability).
The RT1003 does not show the correct time
- Ensure that the UTC offset has been correctly set to the current value in the advanced command (see above).
Comments
0 comments
Please sign in to leave a comment.