
This guide walks you through integrating a Phase One camera with your OxTS INS. The system created at the end of this article is able to take photos using a Phase One camera and save them locally on a PC, then show you how to view the metadata to verify that the images contain the relevant data.
The hardware configuration chosen uses Bluetooth and NTRIP to receive GNSS corrections to the INS so that the position of the pictures is as accurate as possible.
- Software Required
- Components list
- Attaching devices
- Connecting the sub-assemblies
- Event driven:
- Continuous:
- Setting up NTRIP
- Getting your first photo.
- How to check the metadata was added
Software Required
Components list
From OxTS:
- RT1003 or xNAV (Other OxTS devices can be used. Please contact support for the relevant config information)
- 14C0038B Cable
From Phase One
3. iXU150 Camera
4. USB A to USB B
5. LEMO to 9 wire cable (see additional files on creating this cable)
6. LEMO to 2 wire cable (see additional files on creating this cable)
Additional Equipment:
7. 2 GPS Antennas
8. 2 SMA to SMA cables
9. Ethernet cable
10. RJ45 Coupler
11. 9 way to 15 way serial adapter (pinout available from OxTS)
12. Bluetooth adapter
Once you have created the power and data cable component numbers 5 and 6 by following the instructions in the cable guide you are ready to proceed with this set up guide.
Attaching devices
The following images show how to attach the cables to the devices. On the camera components 4,5 and 6 will be attached.
- Component 4 attaches via the USB Type B port located on the bottom left of the cameras interface panel.
- Component 5, the data cable, attaches via the leftmost LEMO connection.
- Component 6, the power cable, attaches via the rightmost LEMO connection.
This completes the camera sub assembly.
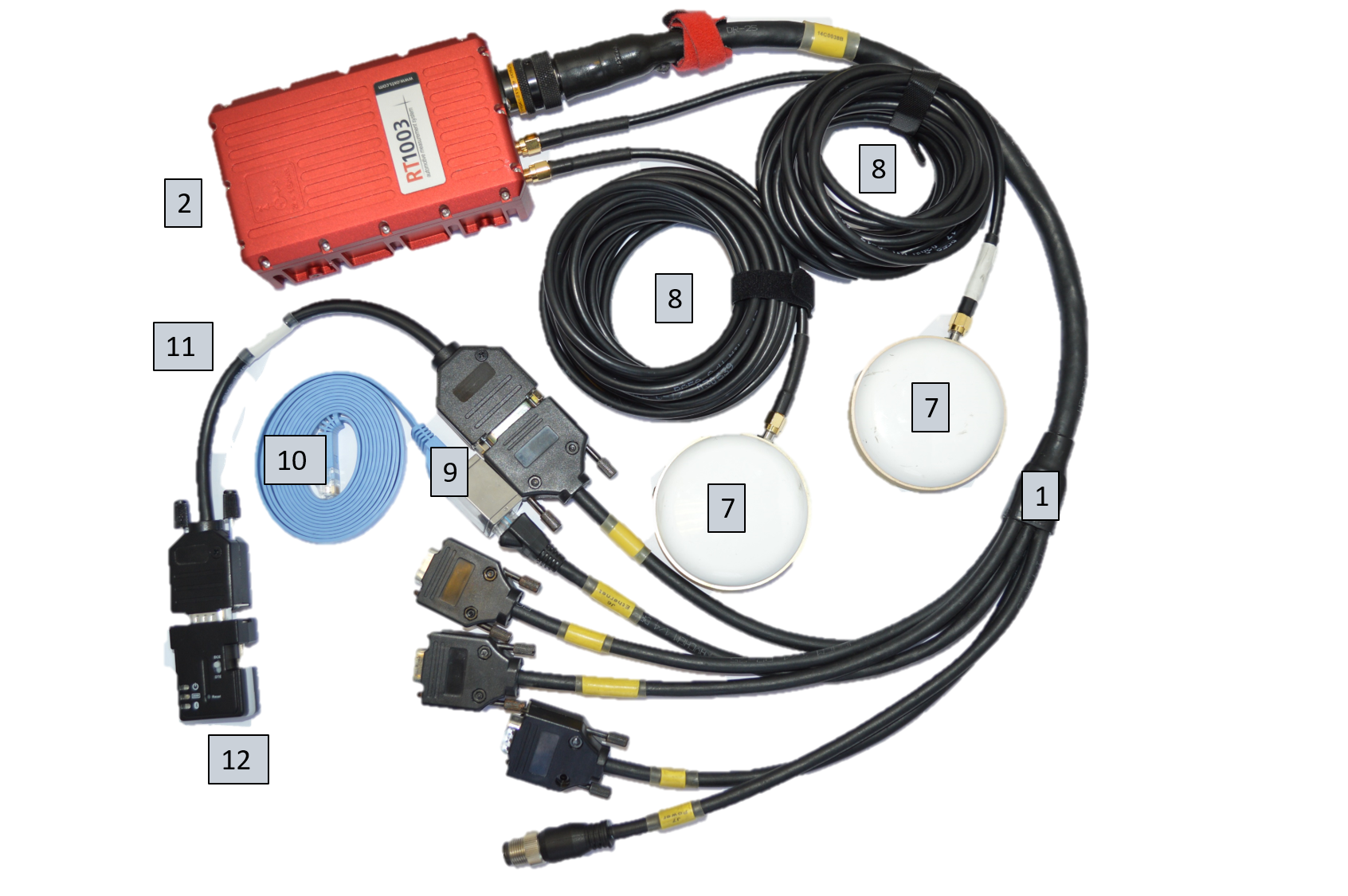
The INS sub-assembly consists of components:1,2,7,8,9,10,11,12 (shown below)
- Component 1,the 14C0038B cable, attaches via the Deutsch connection on the INS
- Components 9 and 10, the Ethernet links, attach to the existing RJ45 connection on the 14C0038B cable.
- Components 11 and 12, Bluetooth connection, attaches via the 15 pin serial connection.
- Components 7 and 8, the GPS receivers attach via the two SMA connections.
Connecting the sub-assemblies
The following image shows how the Camera and INS sub-assemblies fit together. This is done by attaching the two remaining serial connections on the camera sub assembly to the two serial connections named RS-232 and Digital I/O.
General settings for the camera.
Images taken will be stored on the connected computer in this example. The second option is to use a compact flash card.
On the cameras Home screen, select Menu > Storage > Storage mode and select USB.
On the cameras Home screen, select Menu > GPS Settings. The GPS Settings screen appears.
There are two possible ways an INS system sends data to a Phase One aerial camera:
• Event driven — the data is generated at the exact time of the mid-exposure
pulse.
• Continuous — the INS sends the data in a continuous stream to the
camera. The output frequency of the INSshould not exceed 10 Hz. The
data stream is now valid for one second. In the case of the GPS receiver
failing to transmit information, the file does not contain GPS data.
Event driven:
Settings for the Camera:
To configure your camera to work with the INS do the following (pictures shown below):
- From the GPS Settings screen, select GPS Receiver. The GPS Receiver screen appears.
- From the GPS Receiver screen, select OxTS Device
- From the GPS Settings screen, tap GPS Baud Rate. The GPS Baud Rate screen appears.
- From the GPS Baud Rate, select 115200
- From the GPS Settings screen, tap GPS. The GPS screen appears.
- From the GPS screen, select On.
Settings for the RT1003:
Click here to be taken to settings for Inertial+/Survey+/RT3000
Running through NAVconfig the following settings need to be committed alongside normal configuration information.
- Performance Options tab:
- Trigger 1: Input trigger
- Trigger 2: output trigger set to desired rate e.g. 1 pulse every 5m (shown below)
- Serial 1 output: NMEA 115200bps: GGA,VTG,ZDA,GST,PASHR
On trigger 1 falling.(shown below) - Ethernet output: Enabled 100hz and all trigger options (shown below)
- Advanced: type "- trig_2_dist_oneshot10000"(shown below)
Continuous:
Settings for the Camera:
To configure your camera to work with the INS do the following (pictures shown below):
- From the GPS Settings screen, select GPS Receiver. The GPS Receiver screen appears.
- From the GPS Receiver screen, select NMEA Device
- From the GPS Settings screen, tap GPS Baud Rate. The GPS Baud Rate screen appears. 5. From the GPS Baud Rate, select 115200
- From the GPS Settings screen, tap GPS. The GPS screen appears.
- From the GPS screen, select On.
Settings for the RT1003:
Click here to be taken to settings for Inertial+/Survey+/RT3000
Running through NAVconfig the following settings need to be committed.
- Performance Options tab:
- Trigger 2: output trigger set to desired rate e.g. 1 pulse every 5m (shown below)
- Serial 1 output: NMEA 115200bps: GGA, VTG, ZDA, GST, PASHR 5hz (shown below)
- Ethernet output: Enabled 100hz and all trigger options (shown below)
- Advanced: type "- trig_2_dist_oneshot10000" (shown below)
Setting up NTRIP
It is now advised to set up NTRIP so that you get the greater accuracy position data for your images. For NTRIP setup over Bluetooth please follow this guide.
Getting your first photo.
- You now have all the settings and connections required to get your first photo.
- It is advised that you open Navdisplay to confirm the INS' current status though not necessary for the final function.
- Check your device is initialised and then to drive the specified distance and the camera will start taking photos.
- The camera unless told otherwise will store the photos in a folder named Capture One in your pictures library. Capture One will show you these photos as they are taken.
How to check the metadata was added
Unfortunately, Capture One does not allow you to view all the metadata an image contains but is a useful tool to confirm that the process works as GPS data is easy to view. Firstly, once you have selected your image in the right-hand selection panel, select the icon in the top right of the window that looks like an information icon as shown below.
- This will open the panel on the left-hand side. In which you can see some of the images metadata. Under EXIF GPS you will see the images Lat, Long and Alt.
- To view all the metadata for an image it is recommended that you download a 3rd party piece of software such as Exiftool.
- The metadata can also be viewed using Notepad++. Firstly right click your desired image and select Export > Variants…
- A menu will pop up. Select a format you are happy with then select the "Metadata" tab under the Export Recipe panel and ensure that all the options are selected.
- You can then click Export and the software will create a new image in the path specified in the Export Location panel. If you open this file in Notepad++ and scroll down past the unreadable information, you will find the metadata as shown in the image below.
Settings for the Inertial+/Survey+/RT3000 (Event Driven):
Running through NAVconfig the following settings need to be committed alongside normal configuration information.
- Performance Options tab:
- Distance output: output trigger set to desired rate e.g. 1 pulse every 20m (shown below)
- Serial 1 output: NMEA 115200bps: GGA,VTG,ZDA,GST,PASHR
On trigger 1 falling.(shown below) - Ethernet output: Enabled 100hz and all trigger options (shown below)
- Advanced: type "-dist_oneshot10000
-trig_1_input"
(shown below)
Settings for Inertial+/Survey+/RT3000 (Continuous):
Running through NAVconfig the following settings need to be committed.
- Performance Options tab:
- Distance Output: output trigger set to desired rate e.g. 1 pulse every 5m (shown below)
- Serial 1 output: NMEA 115200bps: GGA, VTG, ZDA, GST, PASHR 5hz (shown below)
- Ethernet output: Enabled 100hz and all trigger options (shown below)
- Advanced: type "-dist_oneshot10000
-trig_1_input"
(shown below)
|
|
|
Comments
0 comments
Article is closed for comments.