
Contents
Introduction
Overview
Velodyne Interface box
Connecting the xNAV
Configuring the xNAV
Serial 1 output
PPS
Capturing LiDAR data
Creating a georeferenced pointcloud
Introduction
The Velodyne VLP-16, or "Puck", is a 3D LiDAR laser scanning system ideal for use in UAV aerial mapping applications. In order to create an adjusted, properly georeferenced pointcloud suitable for feature extraction and analysis, an inertial navigation system (INS) is required. When synchronised with a LiDAR system, the GNSS+IMU data fusion provides accurate, robust trajectory information that combines with the mobile LiDAR data.
The xNAV550 INS is an ideal companion to the Puck since it is also small and lightweight, but incorporates survey-grade dual GNSS receivers and high-grade MEMS inertial sensors for maximum position accuracy and precise heading and orientation measurements.
Overview
In order to integrate the xNAV550 and Puck, the following equipment is needed:
- xNAV550 system
- xNAV user cable
- 2 x GNSS antennas
- VLP-16 system
- Velodyne interface box
- Power supply
- Laptop running NAVsuite and Veloview
- Ethernet cable
Velodyne Interface box
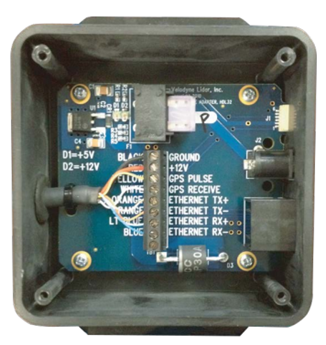
The Puck comes attached with an interface box that provides protection against over voltage and reverse voltage, as well as providing a standard Ethernet and power connector for easy connection.

In order to synchronise the laser data to the GPS time from the xNAV, a one-pulse-per-second (PPS) and $GPRMC NMEA message must be output from the xNAV to the Puck. In order to wire a connection to the interface box, the top face can be removed to allow access to the connectors as seen below.
Connecting the xNAV
The xNAV user cable splits into a number of different connectors. The relevant connectors for connecting to the Interface Box are the J4 RS-232 serial connector and the J5 Digital I/O connector.
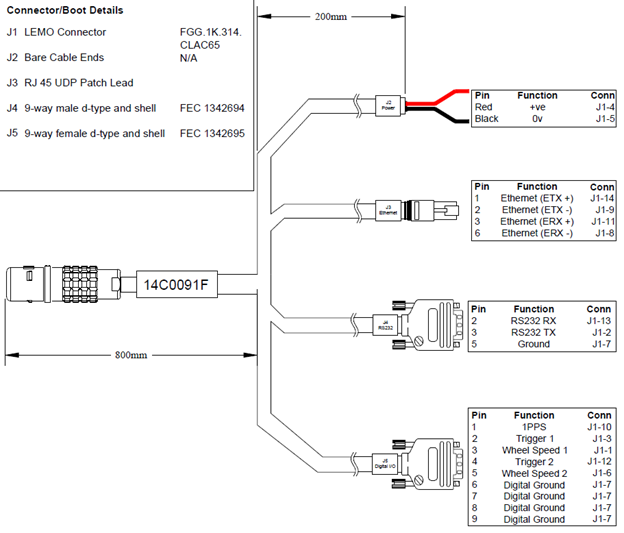
Pin 3 of the J4 connector should be wired to the GPS RECEIVE screw terminal of the interface box. This pin transmits the serial data over RS-232, which will be configured to send the required NMEA message later.
Pin 5 of the J4 connector should be wired to the GROUND screw terminal of the interface box. This pin provides a reference level for the RS-232 signal and the PPS pulse from the xNAV.
Pin 1 of the J5 connector should be wired to the GPS PULSE screw terminal of the interface box. This pin transmits the PPS output for synchronisation to the scanner.
Configuring the xNAV
This guide won’t cover the full process of configuring the xNAV, just the steps relevant to working with the VLP-16. Full details for configuration can be found in the xNAV user manual.
The xNAV is configured using the NAVconfig software supplied. The configuration can be created offline without being connected to the xNAV, but in order to commit the configuration to the system you will need to connect to it with the Ethernet connector on the user cable.
When configuring the xNAV you must make sure the details on the Hardware Setup > LiDAR Scanner tab in NAVconfig are correct. Select the Scanner type as 'Velodyne VLP-16' and put in its IP address. This usually comes as 192.168.1.201 for the VLP16. Select the boxes to log telemetry and data; you should not need to alter the ports. In the synchronisation section you can select to send the NMEA data from the xNAV to the LiDAR over ethernet or serial depending on your setup.

It is important that your INS is initialized while it is taking data, this is because initialization is used as part of the synchronization check. Initialisation is when your INS device locks onto its location and heading. You are able to view in NAVdisplay if your system is initialised or is ready for initialisation. You do not have to begin your survey initialized but at least one third of the time your data file is recording you should be initialized. In NAVconfig > Environment you can set your initialisation settings to use static (requires dual antenna) or dynamic initialisation .
The VLP-16 requires a once-per-second GPRMC NMEA message to timestamp the laser firing. The NMEA messages are configured on the serial output. If you are not using NAVsuite 2.8 and you choose ‘Send NMEA over serial 1’ as an option you will need to then go to NAVconfig > Interfaces > Serial 1 Output and ensure that GPGGA and GPHDT are switched off (see Figure 5).

In NAVconfig > Environment you will need to select ‘Enable local coordinates’ and choose your origin (see Figure 6). This can be done in post-processing in NAVsolve > Process > Local coordinates or by creating an LRF file manually. Doing it before your survey will simplify the processing later.

It is encouraged that you check that the correct data is being logged and to have a trial before starting your survey. You can easily connect the INS to the LiDAR via the INS user cable and when they are connected and configured properly the INS should be automatically taking the LiDAR data and storing it locally as an LCOM file. OxTS offers multiple cable types with LiDAR adapter interfaces, these can be seen in the manual. Version 3 OxTS INS devices can store up to 32GB of raw data (INS + LiDAR).
While taking your data, you may wish to break up your survey into multiple runs. This can be done easily using NAVdisplay. If you are viewing your INS data in real time then you can click in the box at the bottom of NAVdisplay and type "!log log on" and "!log log off" and then click send to stop and start data logging. The RD file will continue to log as it runs in a separate process of the firmware but the LCOM will stop, you can view this happening by using an FTP connection and seeing that the file size does not grow after refreshing. You can use the same RD file for multiple surveys later.
Capturing LiDAR data
The VLP-16 doesn't require any configuration or setup in order to start producing laser data once powered on. The LiDAR data should automatically starting logging internally onto the xNAV in an LCOM data format.
Alternativel: In order to log the data, the UDP packets must be captured using the Ethernet connector on the interface box. Some examples to do this are to use Velodyne's open source VeloView software, which can be downloaded from http://www.paraview.org/Wiki/VeloView, or the application Wireshark which can be downloaded from https://www.wireshark.org/.
To record PCAP data, it may be necessary to change the network settings of the Ethernet adapter connected to the sensor. The IP address should be set to the following:
- IP address: 192.168.1.xx where xx can be any number except 0, 255, or 201.
- Gateway: 255.255.255.0
Any firewall restrictions should also be disabled.
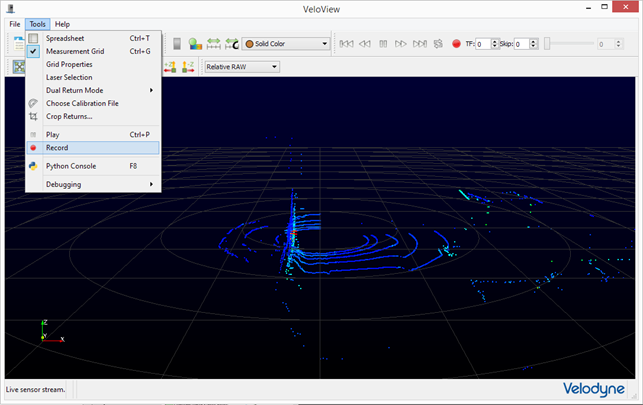
With the sensor streaming data to VeloView, click Tools > Record to start logging a PCAP file.
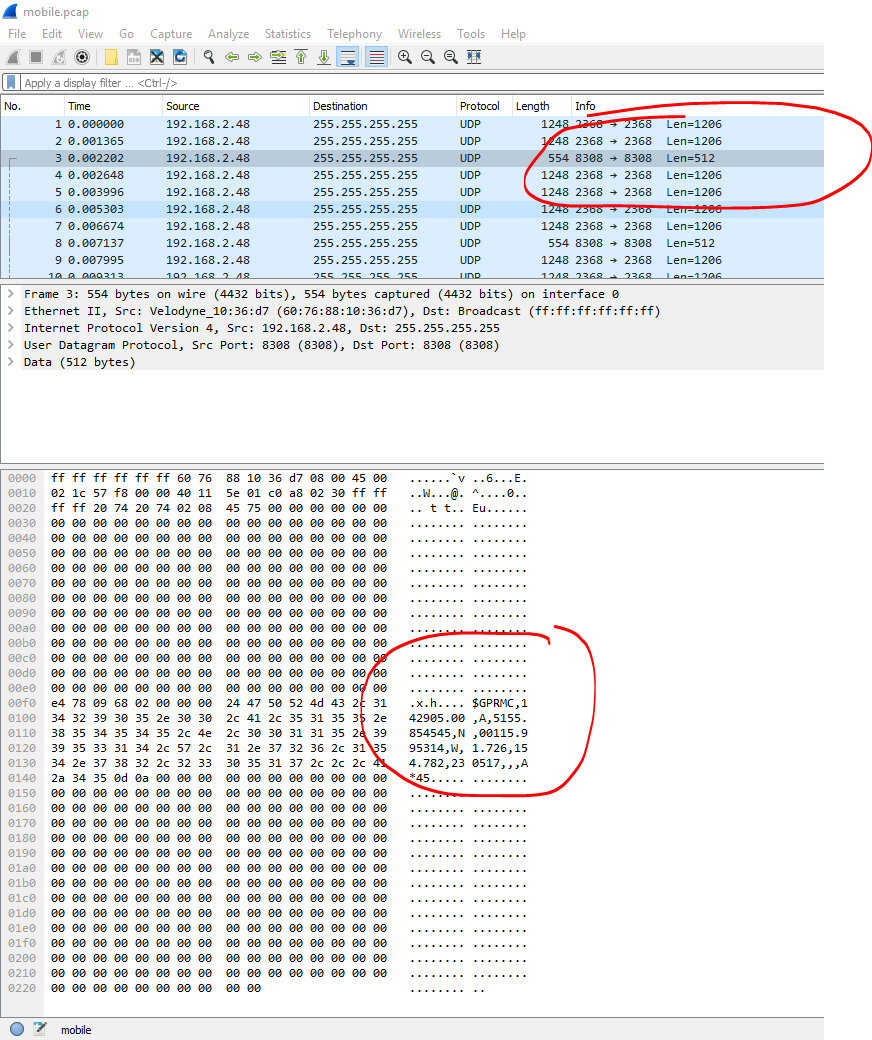
A handy way to check the hardware interface is working correctly is to look for NMEA messages logged in the PCAP file. This is possible using Wireshark to analyse the PCAP file. They are 512 bytes (or 554 with UDP headers).
Creating a georeferenced pointcloud
To create a georeferenced 3D pointcloud, the LiDAR data needs to be combined with the INS trajectory data. There are a number of third-party tools that can do this, or OxTS have developed a custom tool OxTS Georeferencer to combine our trajectory with the Velodyne LiDAR data. OxTS Georeferencer is now available, click here for more information and here for guide to using Georeferencer.
Comments
0 comments
Please sign in to leave a comment.