
1. Summary
This document is meant to be a quick guide on how to use the lane survey and map creation wizards in RT-Range. It describes the basic procedure to complete lane surveys and to use the resulting files to create a map of the surveyed lanes.
2. Lane survey
- Open RT-Range. In the "Lane Survey" wizard line, type the name of the folder where you wish to save your files and add the name of the file where the first line data will be saved. The best option is "Line1". The system will automatically add the .rtrl extension to the file's name.
- Open the Lane survey wizard. In the bottom right corner click on the connection icon, then select the appropriate unit from the NAVconnect window.
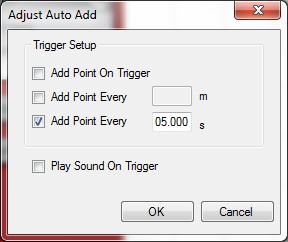
- Click on the "Add point" button and select the suitable option. Click "OK".
- You can now start surveying, moving the trolley right on the line you want to save into your file.
- Once you have completed the survey of the first line, switch "Add point" to "OFF". Then click the "Finish Options" button and click "Save and start new line". This will save the data of the first line into Line1.rtrl, then the system will automatically create the Line2.rtrl file where the points of the second line will be saved.
- Switch "Add point" to "ON" and start surveying the second line.
- Repeat for all the required lines.
- Once you have finished click on "Save and Quit" in "Finish Option". This will take you back to the main RT-Range window.
3. Map creation
- Open RT-Range. In the "Map Creation" wizard line, type the name of the folder where you wish to save your files and add the name of the file where the map data will be saved. The best option is to save the file in the same folder as the line files and to call the the file "Map1". The system will automatically add the .rtrm extension to the file's name.
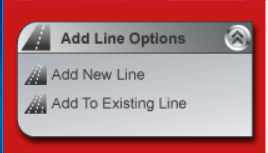
- Open the Map Creation wizard. In the top left corner click on the "Add line Options" button.
- Click on "Add New Line". A window will appear with the saved and available .rtrl files (or you will have to browse to the appropriate folder). Select the line you want to add to the map and click "Open".
- Each line can be added as "Forward" (The same direction as the survey) or "Reversed" (the opposite direction). The direction of the line is relevant to the measurements.
- Repeat steps 3 and 4 for each line you want to add to the map.
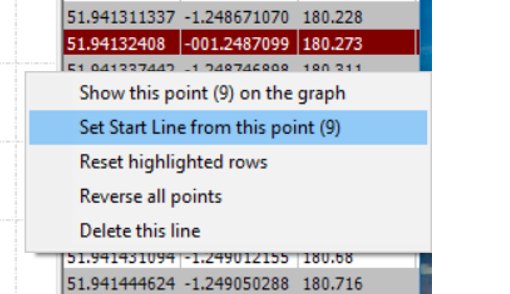
- The lane position measurements start when the vehicle crosses the start line. To set the start line double click on a point of the map that you want to include in the start line, this will highlight the point in the sheet viewer on the right. Right-click on the highlighted point in the viewer and click "Set Start Line from this point", the start line will be added to the map.
- It is possible to change the length of the start line clicking on the "Start Line Option" in the menu on the left and then selecting "Define Start Line Position".
- Once you have finished click on "Save and Quit" in "Finish Option". This will take you back to the main RT-Range window. The map file "Map1.rtrm" is now available in the folder.
Comments
0 comments
Please sign in to leave a comment.