
This document is not intended to be a "how to setup RT-Range guide". It is intended to illustrate some of the key considerations to take into account when using RT-Range and state some of the operating concepts and limits of what is achievable.
Heading Misalignment
All the measurements in the RT-Range system are made with reference to the co-ordinate frame of the Hunter vehicle. As such, any inaccuracies that affect this reference frame will also affect the associated measurements. This means, lateral and longitudinal ranges from the Hunter RT will suffer relative to the heading accuracy of the Hunter vehicle. The diagrams below shows the two scenarios involved:
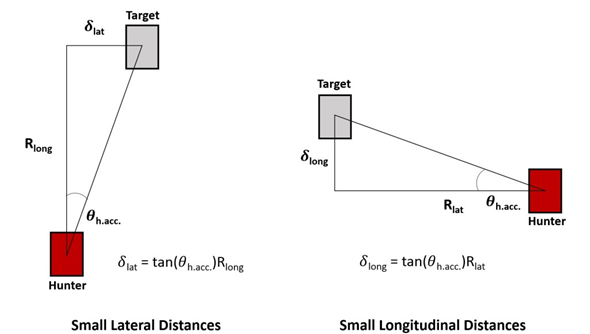
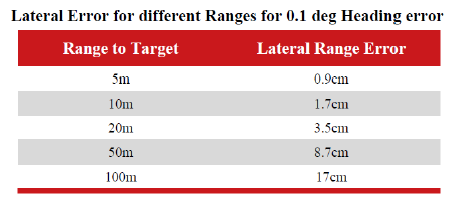
For example, in the first scenario of small lateral distances a heading accuracy of 0.1° at a longitudinal range of 500 m will result in 0.873 m lateral accuracy. In a situation with 60 m longitudinal range, the resultant accuracy due to the heading inaccuracy of the lateral measurement would be 0.1 m. Further examples to illustrate the magnitude of these errors are given in the table below.
Please also note the following points in relation to this:
- Single antenna systems lose accuracy when stationary or at low speeds, whereas dual antenna systems maintain their accuracy in those situations. When using single antenna units, configuring the non-steered axle (Advanced Slip in NAVConfig) in the vehicle improves the system's interpretation of heading with regard to relative motion according to the road. For more information on optimising the accuracy of an RT please see this guide.
- There is the threshold of position accuracy of the actual system and the target to consider. With a Hunter system capable of 0.02 m accuracy, and if your target system was also to be within 0.02 m accuracy, then the resulting Range accuracy would be 0.03 m RMS.
Sensor Point Lever Arm Considerations
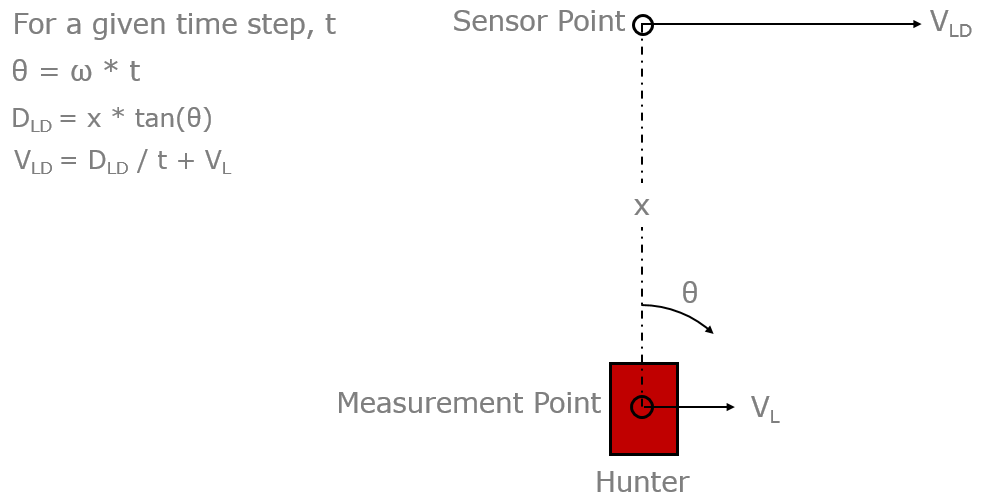
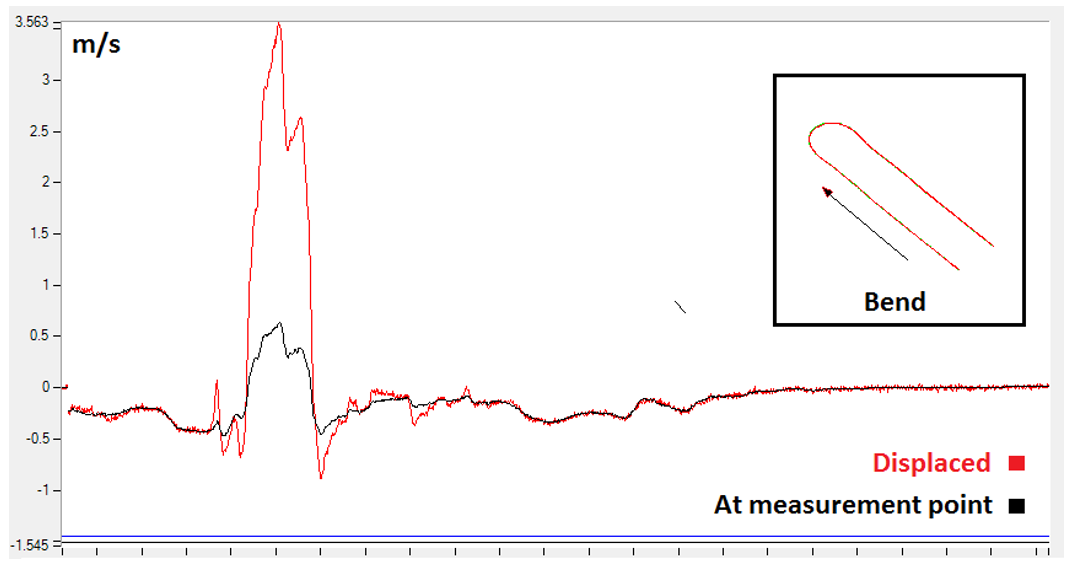
Similar issues can be observed due to the offset of the sensor point or bull's eye within both Hunter and Target vehicles. The example below show how offsetting the measurement point from an RT can change the measurements provided. Here we look at an Hunter with the sensor point set 2 m in front of the RT. Whilst cornering the RT experiences a lateral velocity, ![]() , and an angular rate,
, and an angular rate, ![]() , at it's measurement point. Due to the offset distance to the sensor point this angular rate creates an addition lateral velocity component.
, at it's measurement point. Due to the offset distance to the sensor point this angular rate creates an addition lateral velocity component.
This can be observed in the example data set below.
The above issues around heading error and a displaced sensor point can be compounded to lead to further problems. The image below shows a typical lane measurement scenario with a displaced sensor point. The heading error has lead to the sensor point crossing the lane.

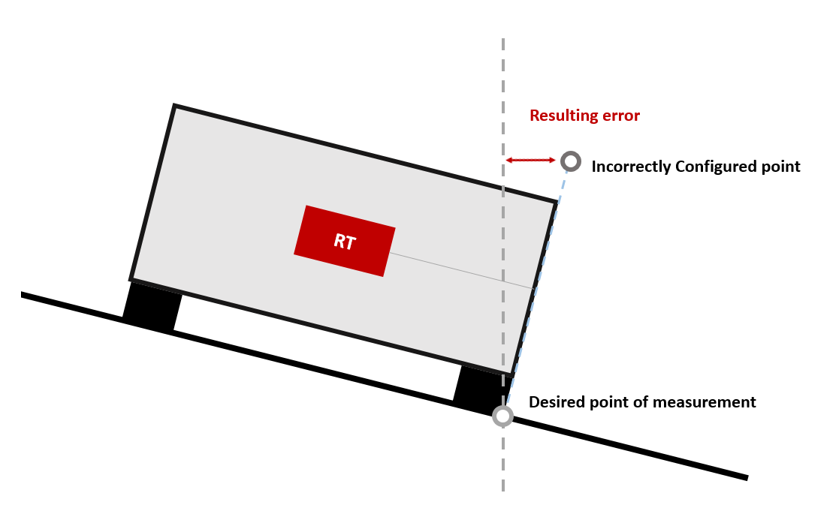
All Range measurements are taken in the level plane, with pitch and roll resolved perpendicular to the gravity. This can lead to errors if testing on an inclined track. The illustration below shows a vehicle making lane measurements with an offset sensor point. The lane is designated by the dotted vertical line. Measurement to this line will show as the erroneous distance, whereas in truth the vehicle is sat perfectly on the line. This illustrates the care that must be excised when using RT-Range systems on banked tracks or similar.
CAN Output
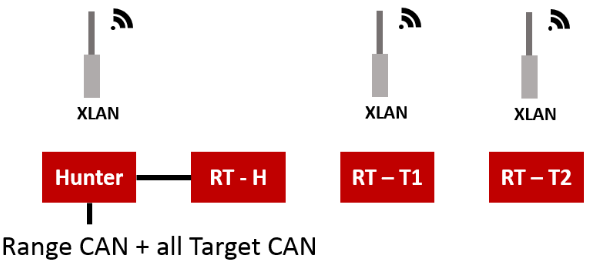
RT CAN measurements can be taken from multiple sources when working in a Range setup. However it is often useful to get them all logged together in the Hunter vehicle. This means that there is no requirement for multiple external logging devices.
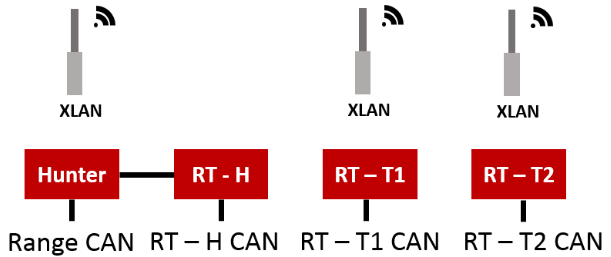
However, there are occasions where it may be preferable to log more data than one local CAN bus will allow. In these cases multiple loggers can be used with full CAN output at each device.
Latency
The diagram below provides a summary of the sources of latency with an RT-Range setup.
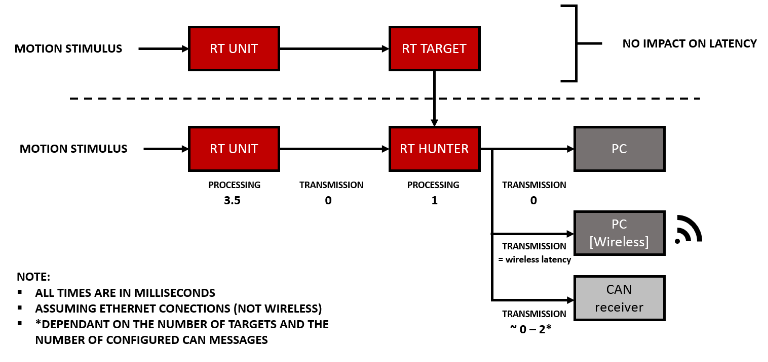
There are two ways latencies are managed:
- Predictive (as in the diagram above): The RT-Target’s behaviour is extrapolated to the time stamp of the hunter and processed to give an output. This essentially removes the target set-up from the latency consideration
- Delayed: The RT-Hunter will be delayed from real-time by a set period that can be configured from the “Configure RT-Range” menu:
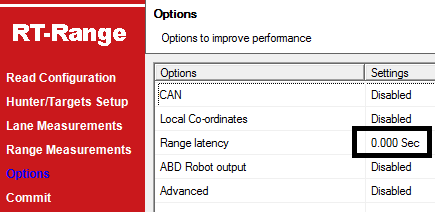
This will force the Hunter to wait the set period before processing the information received from both the Hunter and Target to generate an output. This means you add this set delay (ranging up to the 500 ms) to the built delay of the set-up (as shown in the diagram)
Please do note:
- If you are using Wi-Fi to communicate between units then the transmission time between units depends on the quality of the signal. Within the range of the Wi-Fi system the latency will usually be around 1–5 ms, and deteriorates rapidly at the edges of the range.
- The RT-Hunter processing latency will depend on the complexity of the set-up, e.g. how many Targets are being tracked, whether you use polygons instead of bulls eyes etc. These will range between 1–3 ms
Also, particular measurements will be updated with different associated latencies.
- Acceleration: because this field is sourced directly from the IMU it suffers from the full latency described in the diagram above (i.e. 10+ ms)
- Position/Velocity: position and velocity are predicted by the system depending on a given acceleration, so their delay generally excludes the IMU latency (i.e. 4.5+ ms)
Comments
0 comments
Please sign in to leave a comment.