
RT-Range Output
The RT-Range outputs its data over Ethernet and over CAN bus in real-time.
Target CAN
The navigation CAN messages from target vehicles are output by the RT-Range Hunter. This allows the acquisition system in the hunter vehicle to collect all the measurements from the hunter vehicle and the target vehicles together.
Note that the CAN bus will be overloaded if all the messages from all the vehicles are put on the CAN bus at one time. The RT-Range software can be used to select the CAN messages and the data rates for all the messages that are put on to the bus.
CAN Bus
Cables for the CAN bus will need to be prepared by the user. Because the CAN bus can have many devices or nodes on it, it is impossible to supply a suitable cable for all circumstances.
When preparing the cable, a 120 Ohm terminating resistor between CAN High and CAN Low should be used at each end of the cable. Again, this is a feature of the CAN bus and not of the nodes on the CAN bus. Although CAN is a differential bus and does not require the ground to be connected, many systems will not work unless the ground is connected. You are advised to always connect the grounds of the systems.
See the cable drawings for details of the connections required for the CAN bus.
Configuring CAN
To enable the transmission of CAN messages, set the CAN Baud Rate on the General tab to anything except Disable. For CAN communication to be successful, the baud rate must match the bus it is being connected to.
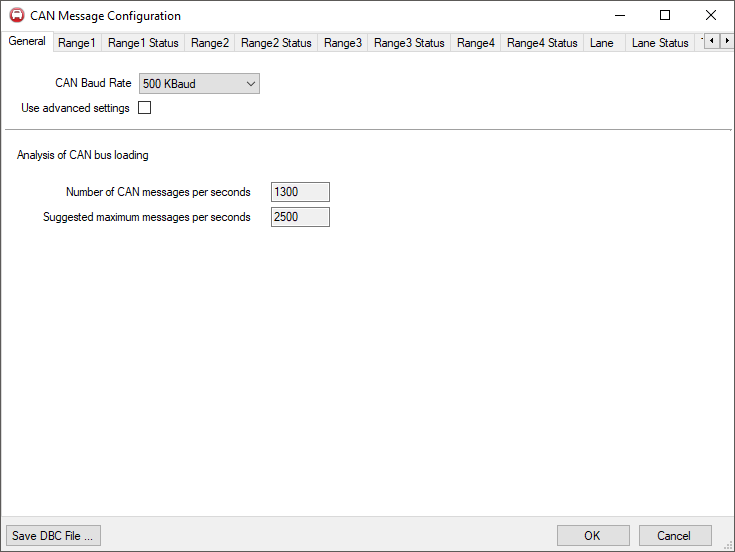 Figure 1. CAN Message Configuration
Figure 1. CAN Message Configuration
CAN bus messages will be output using a default set of CAN identifiers unless the Use advanced settings option is selected. As there are now so many potential CAN messages it is almost always essential to use advanced settings and choose the messages that are needed. The Save DBC File… option can be used to save the correct DBC file for this configuration; this applies to both when the normal or advanced settings are used.
When advanced settings are selected, the Range, Lane and Target tabs are accessible, as shown in Figure 2. These tabs control how the Range, Lane and Target CAN messages are output. The identifiers and data rates can be controlled. If fewer targets are configured on the Hunter/Target Setup page, then fewer Range and Target pages will be visible.
It is very easy to overload the CAN bus using the RT-Range. The CAN bus is not fast enough to communicate all the range, lane and target messages. The number of messages that have been configured is shown on the General tab. An advisory limit for the current CAN bus is also shown, however the limit may be far less than this if there are other sensors on the CAN bus. Typically, ADAS testing has many other sensors so take care not to overload the bus.
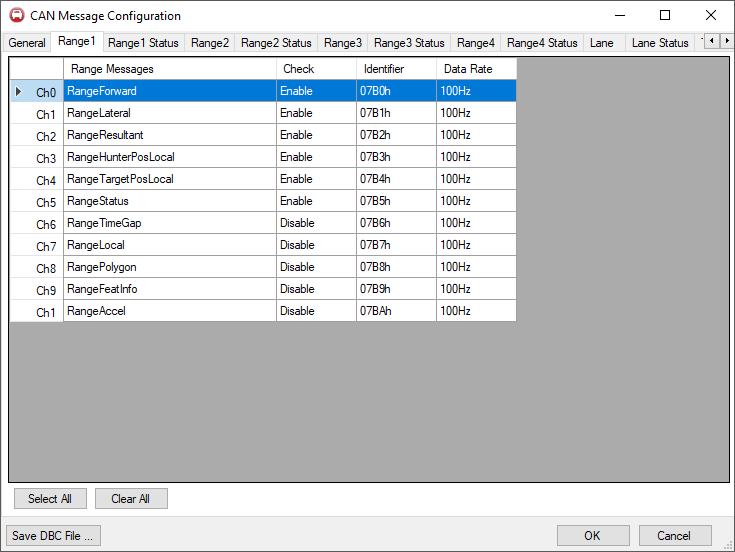 Figure 2. Range Messages
Figure 2. Range Messages
Editing can messages
Once the Use Advanced settings options is checked on the General tab, the CAN messages on all subsequent tabs become editable. To edit a single message, simply double click on it to open the CAN Message Configuration window (Figure 3). The Check option is used to enable/disable transmission of the selected message. The message identifier can be entered in hexadecimal or decimal format in the relevant box. When one value is changed, the value in the other box will automatically update. No error checking is performed on the message identifiers, so it is important to check that no other messages are using the same address.
To edit multiple messages, select the messages you wish to adjust, then right-click and select Edit. The selection does not need to be contiguous. After clicking Edit, the Edit Message window will open, but the identifier options are not enabled. Any change to the Check or Data Rate will be applied to the selected messages.
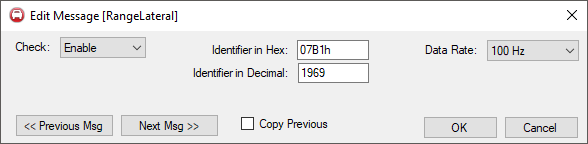
Figure 3. Edit Message
Note: please exercise caution when using the “Copy Previous” function. If each message is copied incorrectly it may the stop CAN output from working correctly.
The << Previous Msg or Next Msg>> buttons allow you to quick scroll through the messages without leaving the Edit Message window. When Copy Previous is selected, the current Check state and Data Rate settings will be applied to the next message when either << Previous Msg or Next Msg >> is clicked. This is a quick way to set the Check state or Data Rate of multiple messages.
Figure 4 shows the target navigation messages, which can be configured in the same way as the range messages. Figure 5 shows the target status messages.
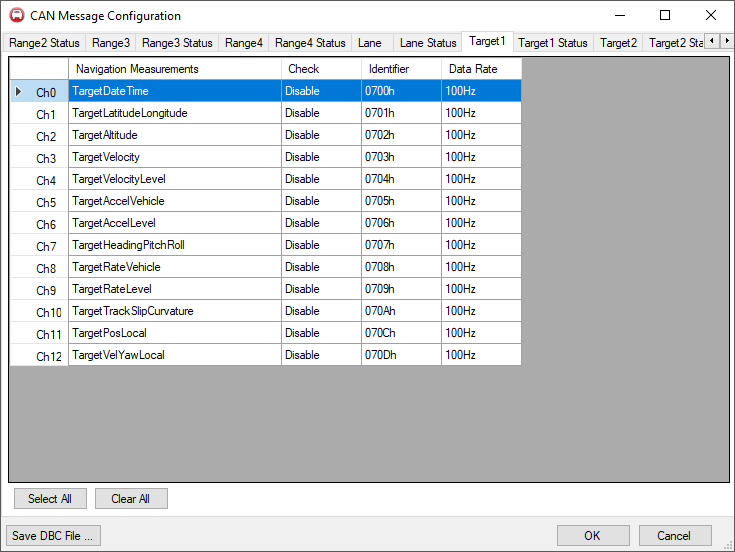 Figure 4. Configurable CAN messages for target navigation messages
Figure 4. Configurable CAN messages for target navigation messages
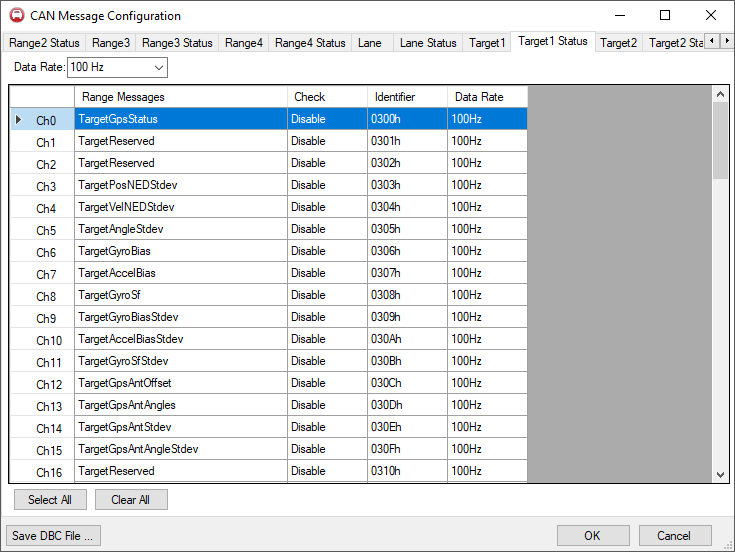 Figure 5. Configurable CAN messages for target status messages
Figure 5. Configurable CAN messages for target status messages
The target status messages are configured slightly differently compared to the other messages. The Ethernet transmission from the RT to the RT-Range does not transmit every status message every 100 Hz (or 250 Hz) cycle; instead only one status message is transmitted each cycle. The RT-Range will apply the same principle. Only one status message will be transmitted each cycle at the data rate that is selected. If packets are dropped by the radio (wireless LAN) from the RT to the RT-Range then these messages will not be predicted or interpolated, they will not be output or an older version will be output.
Comments
0 comments
Article is closed for comments.