
RT systems can be configured to send and receive data via a CAN bus. This allows RT data to be sent to external logging devices, and signals from a test vehicle’s CAN bus to be logged alongside navigation data inside an RT.
By default, CAN communication is disabled. It is enabled by selecting an option from the drop-down list for CAN baud rate on the General tab of the properties window, shown in Figure 1.
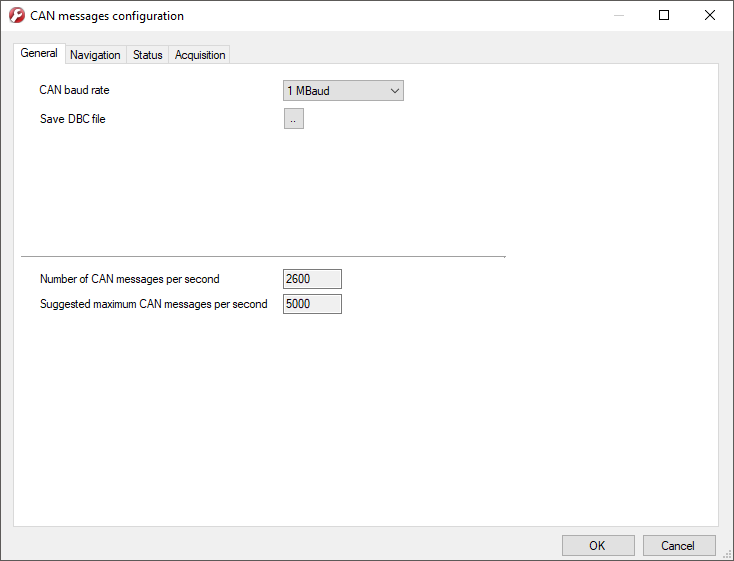 Figure 1. NAVconfig CAN messages configuration window - General
Figure 1. NAVconfig CAN messages configuration window - General
Depending on the baud rate selected, the suggested maximum CAN messages per second will change. A warning message will appear if the combined rate of all current navigation and status messages will overload the CAN bus at the selected baud rate.
Disabling or reducing the frequency of navigation or status messages will remove the warning and ensure reliable operation of the CAN bus. Increasing the baud also works, but the baud rate must be common to all devices on the bus. When using an RT-ANA, the default baud rate is 1 MBaud.
The Save DBC file button generates a CAN DBC library listing all navigation and status messages that are enabled (not greyed-out). The DBC file does not include channels defined under the acquisition tab. The navigation status message binary format is described in the RT manual. The status message binary format is the same as the NCOM status message binary format as described in the NCOM Description manual. Those status messages that do not have signals listed against them are not described at the signal level in the DBC file. The binary format of these messages is quite complex and as such the DBC file it not sufficient to describe the decoding process.
The Navigation tab (Figure 2) is where navigation-related CAN messages are configured for output. The table can be sorted in ascending or descending order by clicking any column header. This is particularly useful when checking for enabled/disabled messages.
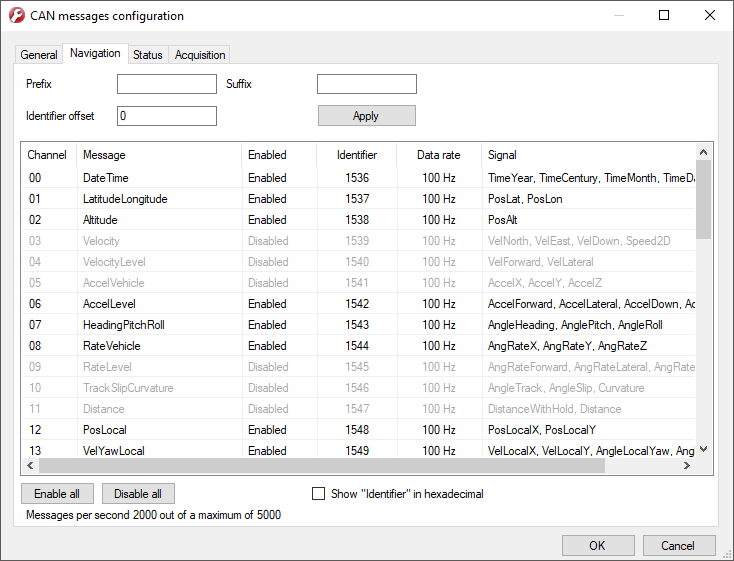 Figure 2. NAVconfig CAN messages configuration window - Navigation
Figure 2. NAVconfig CAN messages configuration window - Navigation
The Prefix and Postfix boxes can be used to quickly add alpha-numeric strings to the beginning or end of all message names. By clearing the prefix or postfix, and then clicking the Apply button, the original message name will be restored.
The Identifier offset box allows users to quickly apply a blanket offset to all CAN IDs. This is useful when IDs conflict with other equipment. Positive and negative integer values can be entered into the Identifier offset box in both decimal and hexadecimal formats. Data entered in hexadecimal format should end with a “h”. To remove the offset, type 0 in the identifier offset box and click Apply.
Each message can be enabled/disabled by clicking in the appropriate cell and selecting from the drop-down menu. The message Identifier is also changed by clicking in the cell. The identifier number should be defined in either hexadecimal or decimal format. Decimal values can be entered as normal. Hexadecimal values should have a letter ‘h’ be appended.
The Data rate can be set using the drop-down list that appears after clicking in each data rate cell. When a message’s data rate changes or it is enabled or disabled, the caption at the bottom of the window displaying messages per second updates to reflect the new settings.
The Enable all button quickly enables all messages. The Disable all button disables all messages.
On RT4000 systems the default set of CAN messages may overload the CAN bus (depending on how many slip points are used and whether local co-ordinates are configured). It may be necessary to reduce the number of messages that are output on an RT4000 system.
The Status tab (Figure 3) lists all status messages, which are sent one after another in a repeating loop. Although 80 messages are shown in the list, 100 are actually used internally. If the data rate is set to 100 Hz, a status message will be sent every 10 ms. Some messages are transmitted more frequently than others because they appear in the list more than once. At a data rate of 100 Hz, each message in the Status tab will be transmitted on the CAN bus once per second.
The Enable all button quickly enables all status messages. The Disable all button disables all status messages. Messages shown in grey are not included in the CAN DBC file.
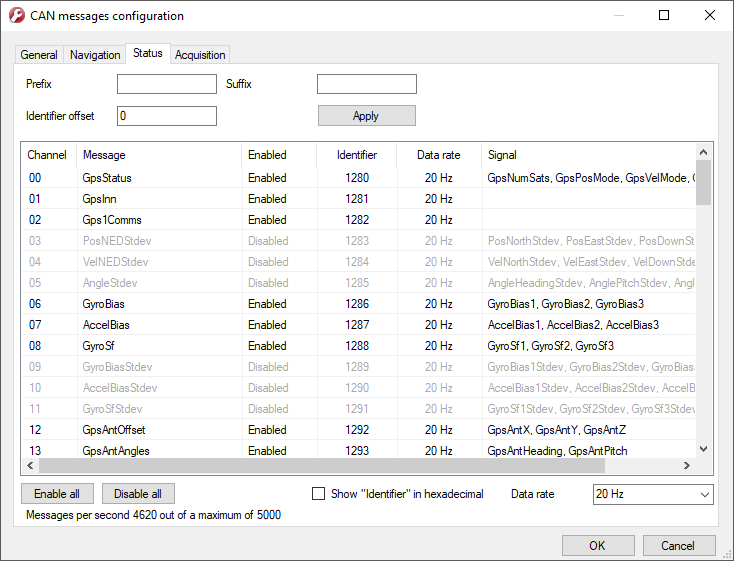 Figure 3. NAVconfig CAN messages configuration window - Status
Figure 3. NAVconfig CAN messages configuration window - Status
The Acquisition tab (Figure 4) is where incoming CAN signals are defined. These signals can be viewed in real-time along with the RT’s native data using NAVdisplay, or at a later time using NAVgraph.
NOTE:
- the RT is only capable of acquiring 12 messages
- in order to utilise CAN acquisition, you will need the appropriate feature code. This can be purchased through your representative, or by contacting OxTS directly.
Channels are added to the acquisition list by clicking on the Load DBC file button and selecting a valid CAN DBC file. The top 12 messages in the list acquisition list are logged at the RT’s update speed of 100 Hz or 250 Hz. This is not adjustable.
Extra CAN messages (those on the grey background) do not need deleting from the list but will not be logged. To move a message up into the top 12 area for logging, rightclick on messages above and delete them from the list. To remove individual signals from a message, right-click on the signal in the right-hand window to bring up the delete option.
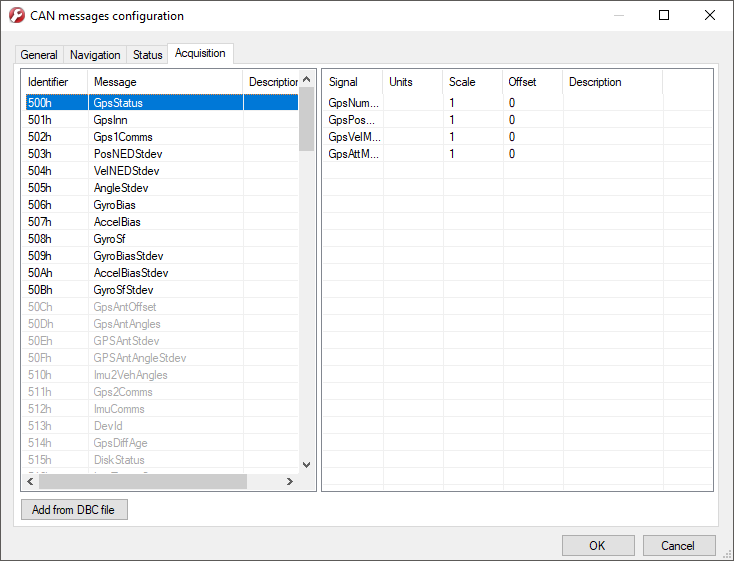 Figure 4. NAVconfig CAN messages configuration window - Acquisition
Figure 4. NAVconfig CAN messages configuration window - Acquisition
The Message name, Signal name and Units can be edited in the CAN Signal Properties window (Figure 5). This is opened by double-clicking any signal. Changes made using NAVconfig are independent of the DBC file, and will not affect it or be saved.
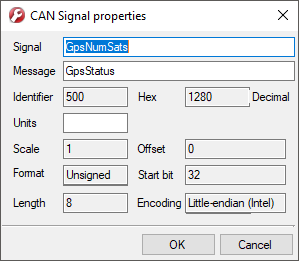
Figure 5. NAVconfig CAN Signal properties window
Comments
0 comments
Article is closed for comments.