This article will include some information on using a wheelspeed sensor with the Survey+. A wheelspeed sensor is a perfect partner to an INS in GNSS-challenged environments for getting precise and consistent data. A WSS can be used with the xNAV650 also.
INS devices are heavily reliant on clear GNSS signals to maintain high accuracy. As soon as obstructions or interferences are introduced, accuracy can quickly decrease. A few trees and buildings can make an INS unit go from survey-grade 2cm global accuracy to the best part of a meter very quickly. There are numerous ways to improve GNSS consistency but one of the best ways to maintain INS accuracy is using an additional aiding source such as a wheelspeed sensor.

Promotion image of the Luxact fastened to a car.
Setting up a wheelspeed sensor with your INS is simple. There are two primary aspects: interfacing and configuring.
Interfacing
Ensure that your wheelspeed is set up as specified in its manual with the correct orientations and distances to ground etc.
You might have to furnish an adapter cable between the wheelspeed and the INS device. This will simply involve routing the correct electrical signals to the correct ports on each respective device. Pinout diagrams can be found for each device in their manuals. If you look at the pinout diagram for the digital I/O connector of the Survey+ you will find the following configuration over a 9 pin male connector:
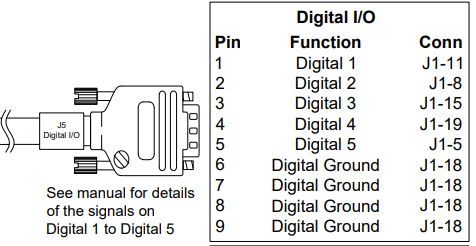
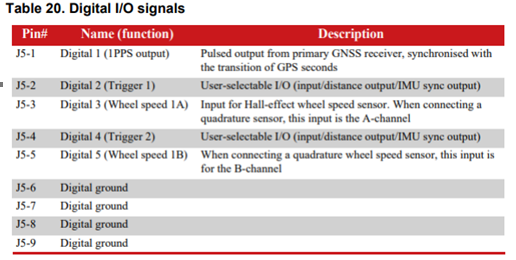
The Survey+ manual specifies wheel speed signals A and B on pins 3 and 5 of the Survey+ Digital I/O connector.
Connect the wheelspeed signals A and B to the correct pins on the wheelspeed sensor and the ground pins likewise. For this Luxact sensor which has a 15 pin output connector, you might wish to create a 9-Way to 15-Way adapter cable between the two.
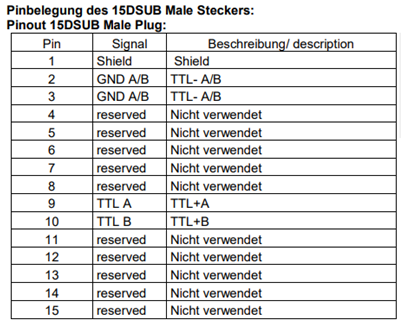
The Luxact wheelspeed manual specifies the signals over their 15-Way output connector.
| Survey+ cable 9-pin connector | Luxact cable 15-pin connector | |
| Ground | 9 | 2 |
| Ground | 8 | 3 |
| Wheelspeed 1B | 5 | 9 |
| Wheelspeed 1A | 3 | 10 |
Table of pin connections needed between the Luxact and Survey+ cables.
The exact pin connections needed will depend on the wheelspeed sensor. The wheelspeed signals will always be on pins 3 and 5 of the Survey+.
Configuring
NAVconfig is designed to make configuring your INS with a wheelspeed sensor as simple as possible. All of the relevant settings can be found on the Advanced Tools>Wheel speed input tab.
Look in the datasheet of your sensor and find a parameter for pulses per mm or something that is convertible to that measurement. This is needed in NAVconfig.
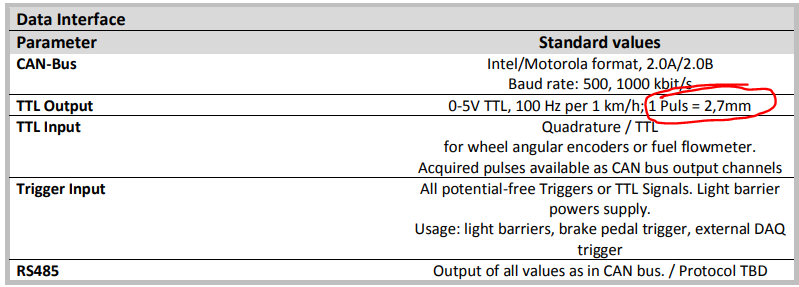
A screenshot of the Luxact 1D wheelspeed sensor datasheet. A pulse every 2.7mm can be input into NAVconfig.
Measure the position of your device with respect to the INS along each axis. Input this into the wheel speed input tab of NAVconfig. Next, input the pulses per metre. This can be done using a pulses per mm conversion such as in the example above or using pulses per revolution by clicking on the dropdown depending on the sensor's mode of operation.
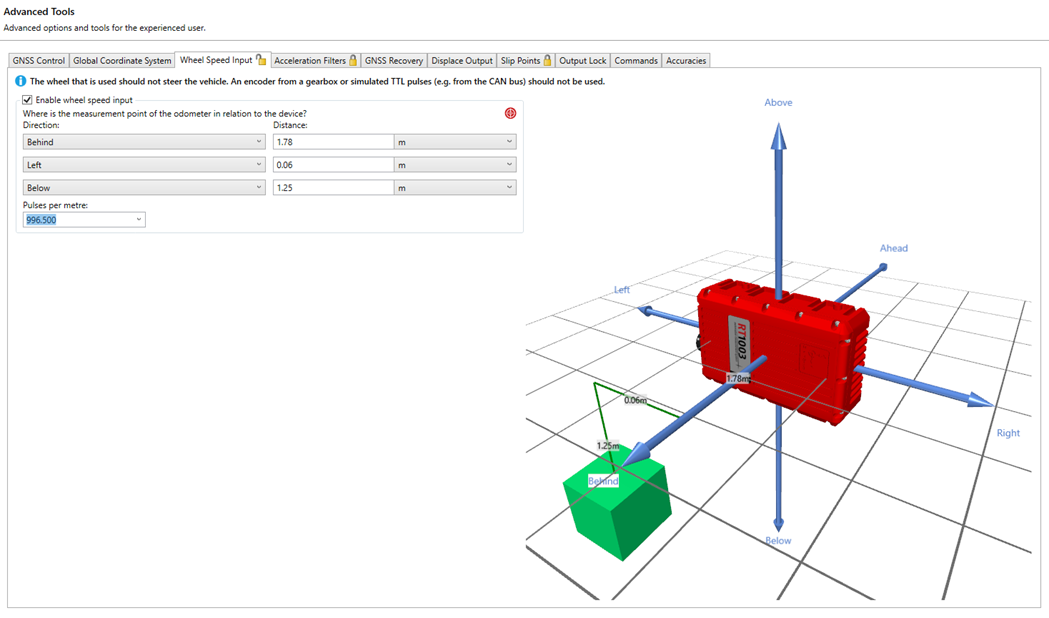
The wheel speed input tab of NAVconfig requires you to put in position measurements and the pulses per metre of the wheelspeed.
In the example above, the Luxact sends one pulse every 2.7mm. This means there are 1000/2.7=370 pulses per metre. This parameter must be roughly correct for the system to work but it can be improved using the improved configuration option and will likely be slightly different.
It may be that you need to specify a multiple of the datasheet number of pulses per metre. You can troubleshoot this using the method below. For example, despite the Luxact specifying 370 pulses per metre, the required value is 3 times this in NAVconfig making it 1110.
There can be complications if you are using additional interfaces. For example, the number of triggers possible with an xNAV650 while using a wheelspeed is less than allowed for on a Survey+.
Checking
You can check that your setup has been successful by monitoring the unit in real time. To do this you will simply need to connect via ethernet to the INS and monitor it in NAVdisplay. You can then modify the NAVdisplay template by right clicking on the graphs and selecting your own choice of measurements and displays. Choose to have speed forward and wheelspeed speed shown on the same graph. These two measurements should be near enough identical. If they are very strongly correlated and scaled the same then your setup is correct.
Processing
Processing your raw data into NCOM is done in exactly the same way as normal. WSS corrections will be applied automatically in processing when they are logged in the raw data which they will be if the setup has been correctly configured. The corrections will give more precise data and be reflected in the measurement accuracies.
The following case study involves a Luxact wheelspeed sensor used with an xNAV550. The performance is evaluated using a VLP16 LiDAR processed in OxTS Georeferencer.
A neighbourhood has been surveyed using a wheelspeed sensor but GNSS was artificially turned off throughout a section of it. The test is a comparison between two datasets that use the same raw data (one single survey) but in one case the wheelspeed data is not used and in the other it is.
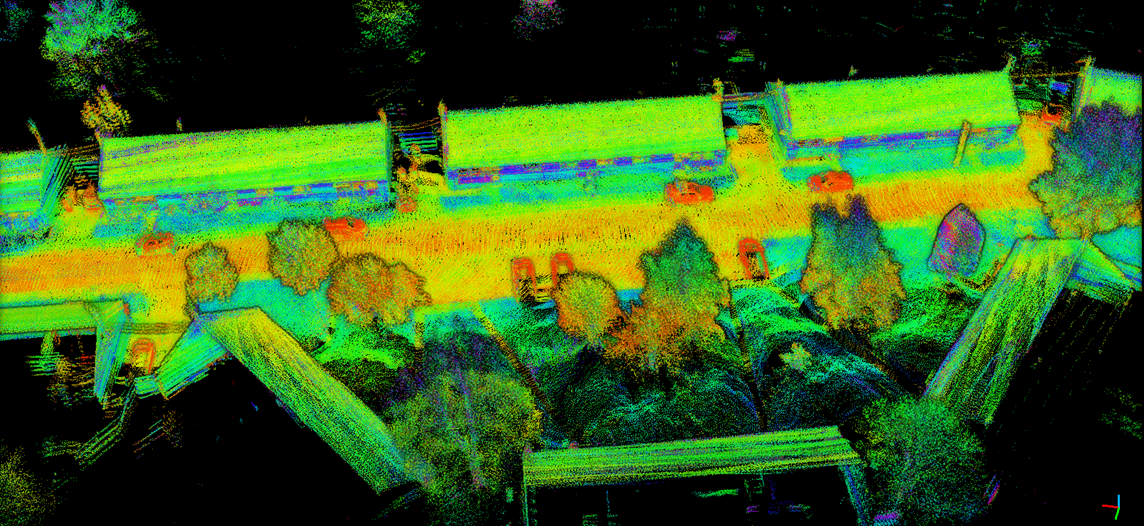
OxTS Georeferencer uses the reported accuracies of measurements (for example horizontal east position accuracy) combined with a generic LiDAR range accuracy to estimate the position uncertainty in points in pointclouds that are produced. This information is analysable and viewable. In the following pictures, a red colour is the lowest accuracy mode (>30cm position error) whereas blue is the highest (~2-5cm) with shades of green and yellow in-between.
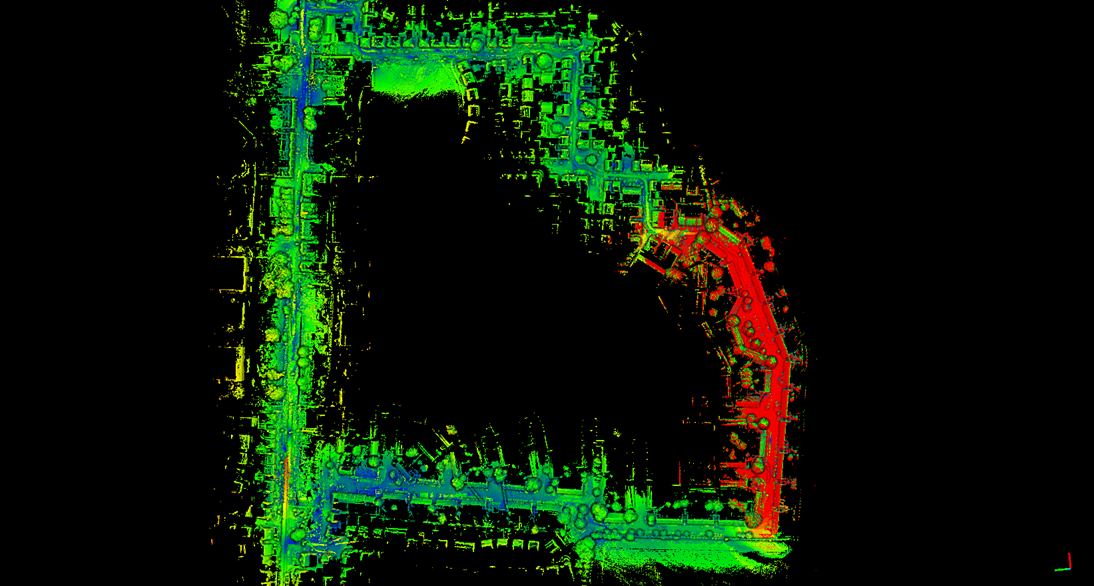
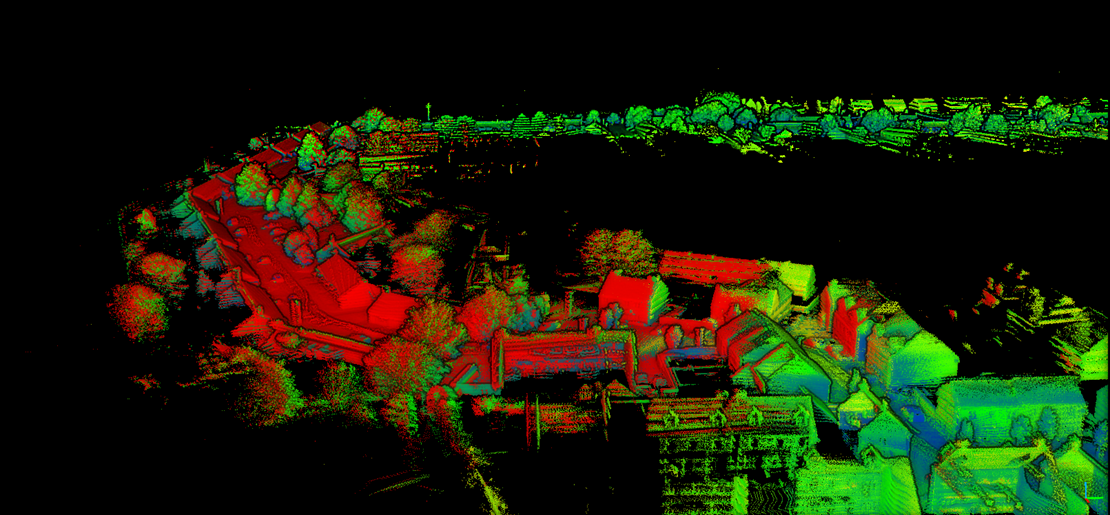
Pointcloud view of a neighbourhood survey. Colour indicates point position accuracy. The section on the right has had GNSS signals artificially removed.
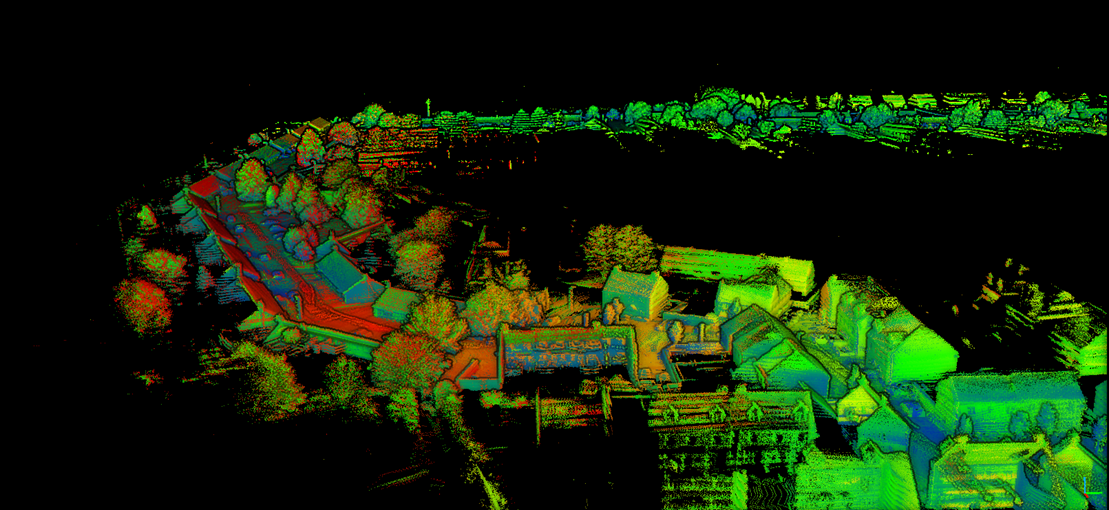
As can be seen, when GNSS is removed, all of the surveyed area enters the least accurate position mode and shows up as red in the pointcloud when no WSS corrections are applied. For the same data with GNSS signals artificially removed but WSS corrections applied, the following improvement can be seen:
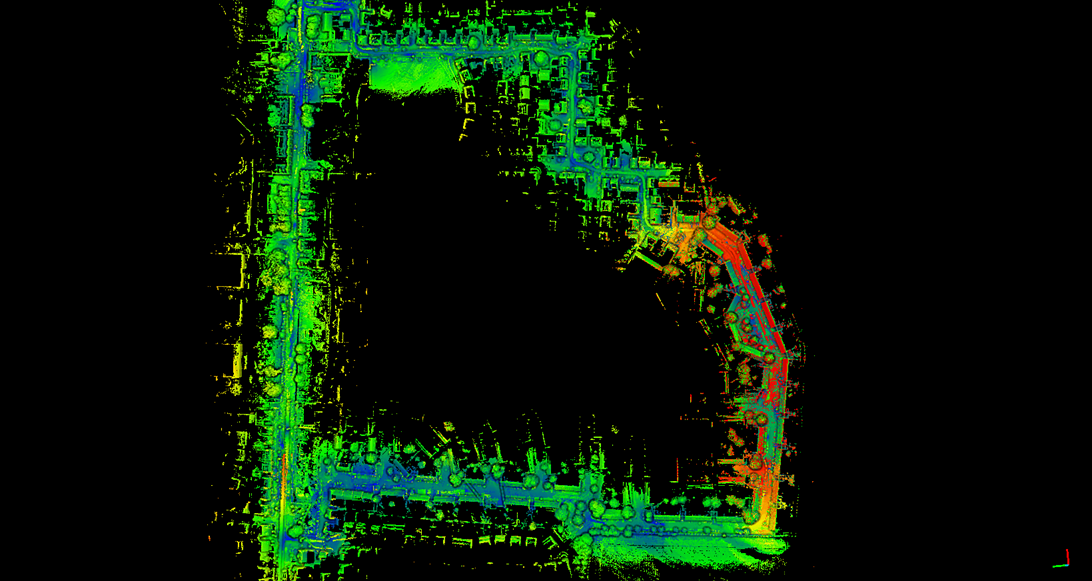
The same raw data as above but with wheelspeed corrections applied.
A vast improvement is seen. Not only on the section with no GNSS but all of the pointcloud has been improved as seen by the higher prevalence of blue and dark green coloured points. Note that Georeferencer allows the removal of inaccurate points so all of the red points can be removed leaving only the green and blue if desired. An area that would yield unusable data can now be surveyed effectively due to the wheelspeed corrections.
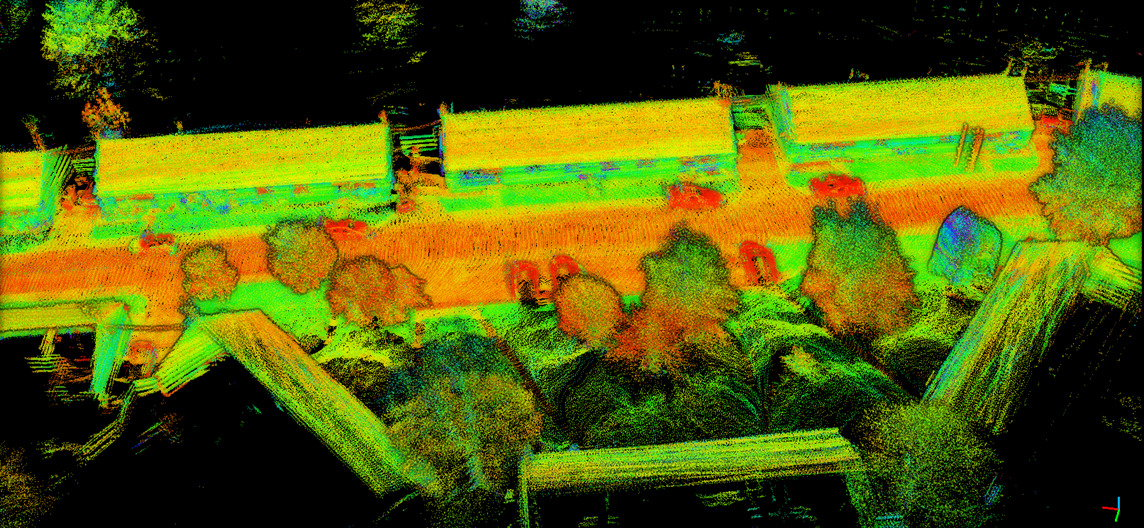
Comparison of part of the GNSS denied area. Double vision and blurring are greatly reduced.
Comparison of part of the GNSS denied area. Double vision and blurring are greatly reduced.
The following three graphs are screenshots from NAVgraph. They display the improvments to accuracies the systems experienced during the GNSS outage (seen in the centre of the graph as the large bulge).
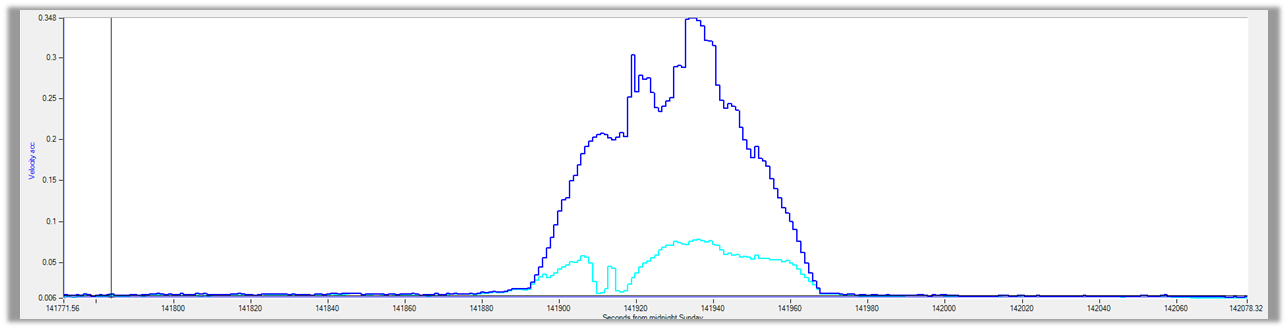 Velocity accuracy: Comparison of velocity accuracy with (light blue) and without (dark blue) wheelspeed corrections. A vast improvement is seen.
Velocity accuracy: Comparison of velocity accuracy with (light blue) and without (dark blue) wheelspeed corrections. A vast improvement is seen.
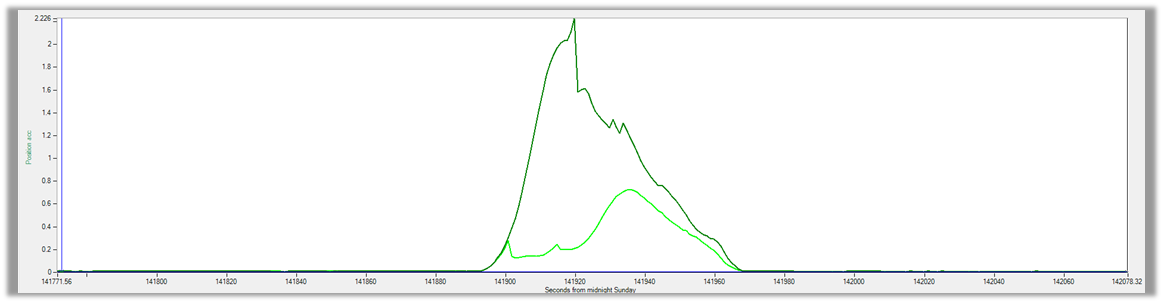 Position accuracy: Comparison of position accuracy with (light green) and without (dark green) wheelspeed corrections. A major improvement is seen.
Position accuracy: Comparison of position accuracy with (light green) and without (dark green) wheelspeed corrections. A major improvement is seen.
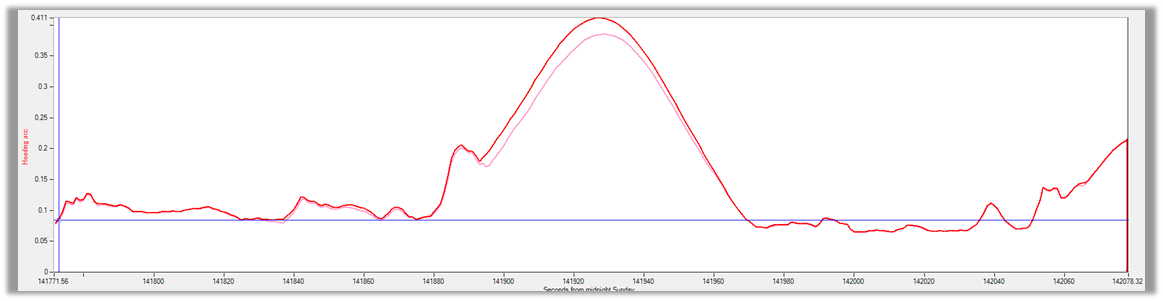
Heading accuracy: Comparison of heading accuracy with (light red) and without (dark red) wheelspeed corrections. A mild improvement is seen.
These accuracies are calculated by the navigation engine using the measurements made, the values are then used to give a 0-255 value to points in the pointcloud.
Contact OxTS
- support@oxts.com and jamacker@oxts.com for technical support with using OxTS Georeferencer and taking your survey data
- sales@oxts.com for sales enquiries
- info@oxts.com for data sets or information
Comments
0 comments
Please sign in to leave a comment.