
Contents
What is a warm-up and why should I perform one?
The OxTS RT series of products are built around a precision IMU receiving drift corrections from GNSS data. To achieve maximum performance, the IMU needs to self-calibrate by receiving a range of motion inputs we call a warm-up.

During a warm-up, the calibration algorithms used for OxTS devices will correct for any change in the response of the sensors that may have appeared over time due to temperature changes or sensor age etc. A dynamic warm-up will allow the system to calculate precise measurements for the IMU’s orientation and antenna positioning – this will greatly improve results. Using a consistent method for a warm-up will lead to a consistent accuracy baseline for all data during testing. In other words, if you have a number of systems that you use regularly, you should have the same warm-up procedure each time to maintain standardisation across data sets.
The warm-up process
After installing the RT, use NAVConfig to enter the position and orientation of the RT in relation to the GNSS antenna and the front and rear axle of the vehicle. This "loose" configuration then needs to be refined so that the RT is able to derive its precise position and orientation. If this is not completed, the RT is not able to provide the 0.1 degrees of heading, 0.03 degrees pitch/roll and 0.01m position accuracy that you need.
To perform at specification, the RT requires information about its location and orientation inside the vehicle and also in relation to the GNSS antennas. This is provided during setup using the NAVConfig tool. However, whilst it is only necessary to measure to a maximum precision of 10cm or 5 degrees when installing the system, the RT needs to refine these values further and correct for any small misalignments. This is done by initializing the system and then performing a full warm-up of the sensors.
When the system is initialized, the vehicle should be driven in a straight line above the initialization speed set in the configuration. This helps the unit to correctly fix the vehicle heading as below:

The heading accuracy as well as the accuracy of other measurements such as pitch/roll, position, velocity and lever arms need to be further improved by performing a warm-up procedure. A warm-up consists of performing actions such as straight-line accelerations and braking motions, as well as driving in circles or slaloms. As you do so, the unit can improve the accuracy of its derived true location and orientation and apply displacement and rotation measurements to the outputs to correct for these errors as shown below:

The NAVassist Plugin
To aid in the warm-up process and to ensure that the unit receives the full range of motion required, OxTS have developed the NAVassist plugin. NAVAssist provides a series of voice guided instructions to take them through a successful warm-up.
NAVassist is supported in NAVsuite version 2.2 or above.
- The best way to access NAVassist is by selecting the warm-up template from the templates list in NAVdisplay. This way, the tool will open within a window of measurements that display the device's accuracy values during the warm-up. You can monitor these in real-time too.
- Alternatively you can access NAVassist via the the 'Utilities' menu' in NAVdisplay.
How to use NAVassist
NAVassist requires the user to perform a number of dyanmic manoeuvres and so you should first drive the vehicle to a safe area where there are no other vehicles around you.
To access NAVassist, simply select the warm-up template from the templates list in NAVdisplay as shown below. The tool will open within a window of measurements that display the device's accuracy values during the warm-up. This allows you to monitor the performance of the unit as you warm up.
 Alternatively you can access NAVassist via the the 'Utilities' menu' in NAVdisplay.
Alternatively you can access NAVassist via the the 'Utilities' menu' in NAVdisplay.
Once the template is open, you should select "Start" and then select the unit that you wish to warm up. The IP and serial number as well as the unit type will be displayed to help ensure that the correct unit is selected. Here, you can also check the firmware version.
With the unit selected, a series of hardware options are checked. This is enables you to quickly check that the unit is configured and working correctly without even needing to initialise.
After checking that the hardware features are enabled, a quick check of the configuration is made. This allows any errors in the configuration to be spotted and quickly fixed. Any of the hardware of configuration checks can be expanded to provide more information using the dropdown arrow.
Lastly, the satellite visibility is displayed along with any correction mode if available.
This process can be shown below:
Once all of the checks are performed, the system is ready to initialise.
From this point, NAVassist provides a series of voice instructions so that the driver can keep their focus on the track and not on the screen. Therefore, you should ensure the volume on your PC is turned up so that you can hear the voice commands.
To initialise, simply accelerate in a straight line to the specified speed and come to a stop as show below. After successful initialisation, NAVassist will display that all required checks have passed. It will then talk through a series of dynamic manoeuvres to warm the system up.
During the dynamic manoeuvres, six graphs appear at the bottom of the NAVassist window. These display the measured range of motion of the three accelerometers and gyroscopes. As you warm the system up, the green area corresponding to received dynamic input will expand.
The first procedure that is required is a slalom. Simply follow the voice instructions as it talks you through the warm up procedure. As this is performed, you should notice most of the measured dynamics area start to fill up as below.
NAVassist is continually monitoring the status of the IMU and will automatically suggest the optimal manoeuvre to give the IMU the required dynamic input. Simply continue following the voice instructions until the warmup is complete.
This process should only take five to ten minutes but can include a range of motions including circular driving, figures of eight and heavy acceleration and braking as below.
 As the system is warming up, NAVassist is continually deriving the precise position and orientation of the unit within the vehicle. After you have completed the required manoeuvres, NAVassist will have an improved configuration available to send to the unit.
As the system is warming up, NAVassist is continually deriving the precise position and orientation of the unit within the vehicle. After you have completed the required manoeuvres, NAVassist will have an improved configuration available to send to the unit.
Improve settings after a warm-up
To apply improved settings to the system, you will first need to complete the previous dynamic manoeuvres. After completion of these NAVassist will display the calculated improved settings including heading and pitch offset and antenna offsets and lever arms as below.
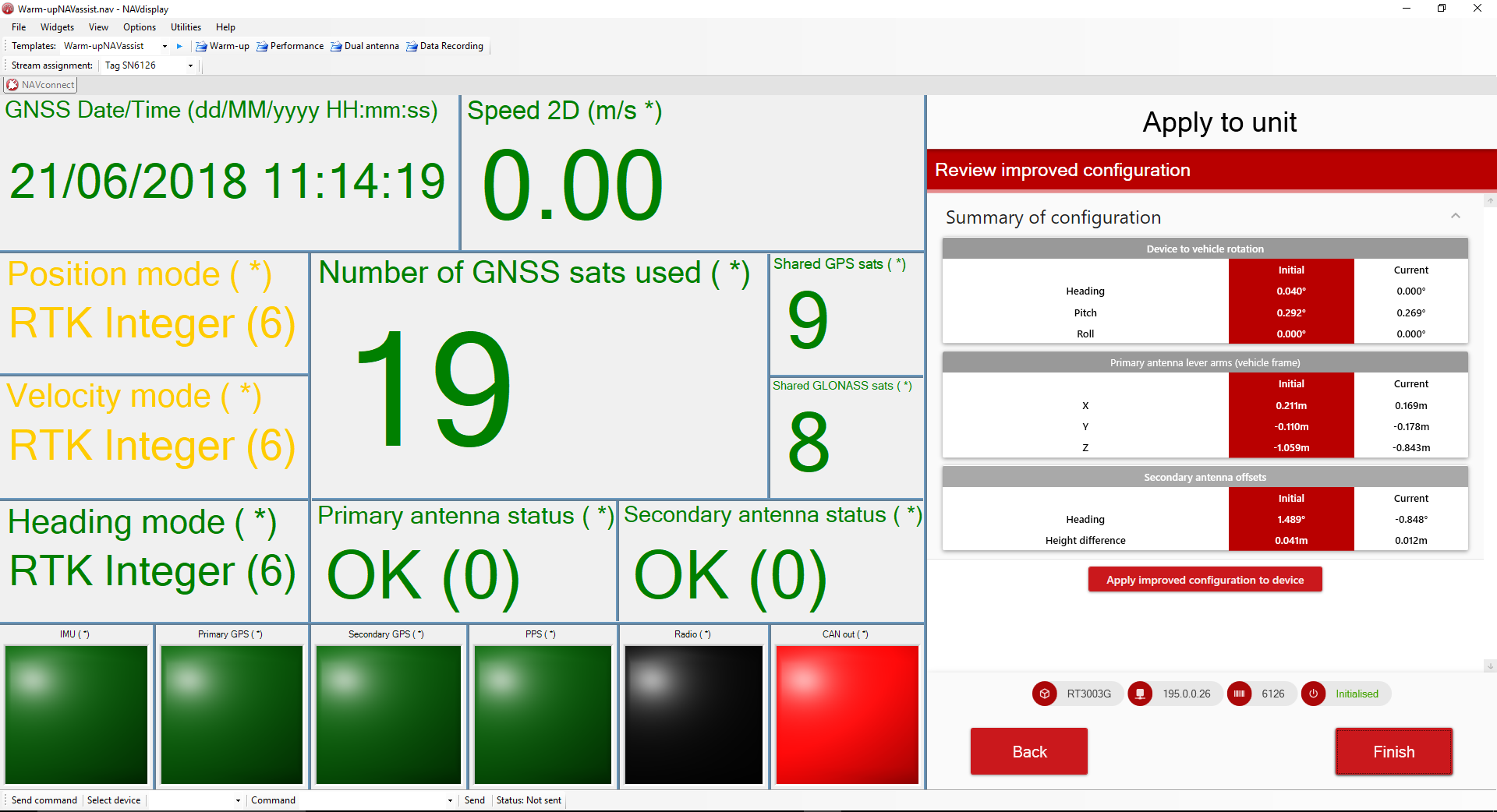
To apply these to the system, simply click "Apply improved configuration to device". For maximum performance, it is important not to miss this step.
Once this is done, NAVassist will confirm if the settings have been successfully updated as below.
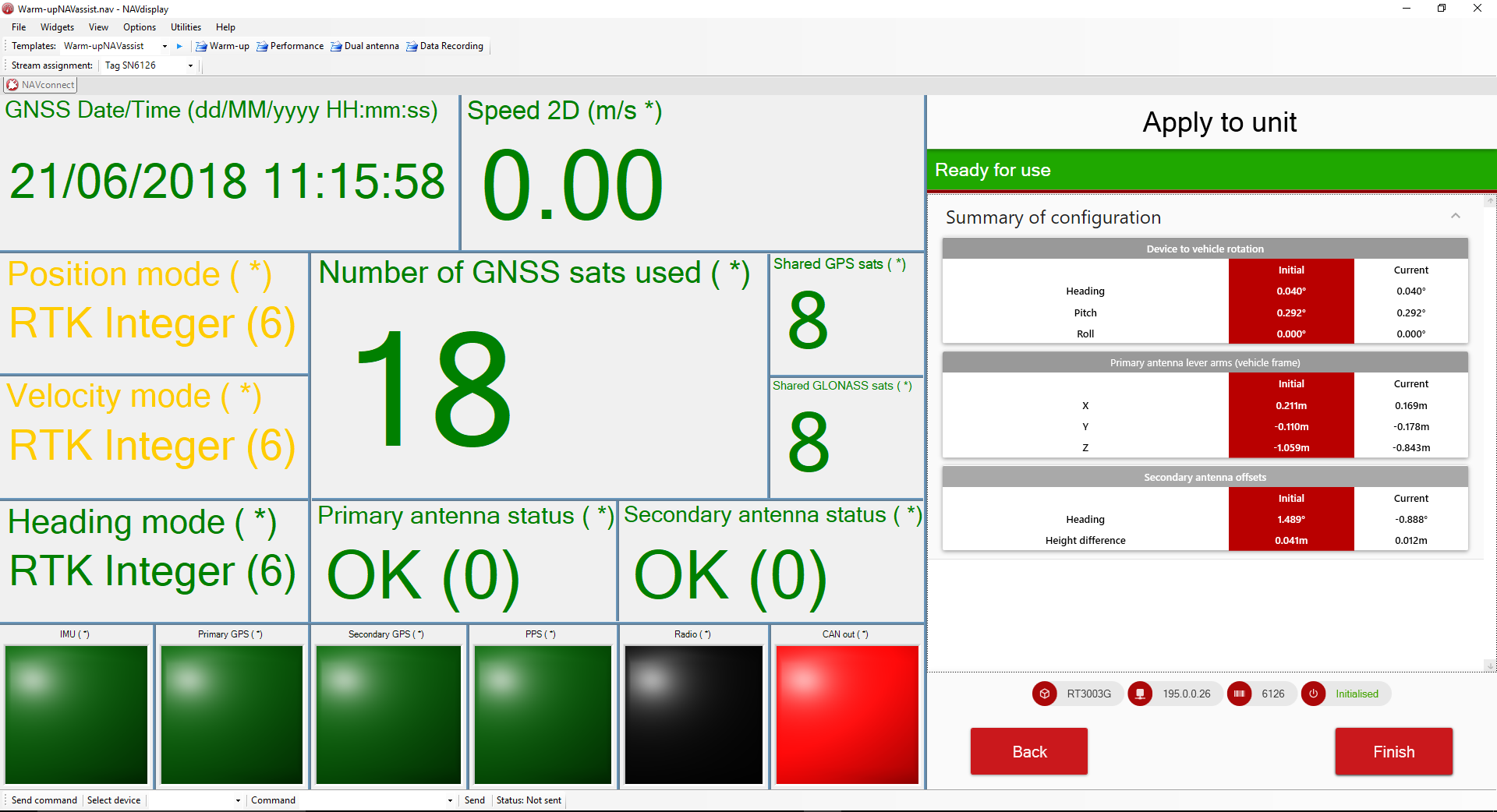
After improved settings have been successfully saved to the system, you can select "Finish" to end the warm up process and your system should be running within specification.
Other considerations
The most important thing to remember is that the IMU requires motion input to be able to accurately calculate outputs. Therefore, after a warm-up is completed, the vehicle should not be left stationary for an extended period of time.
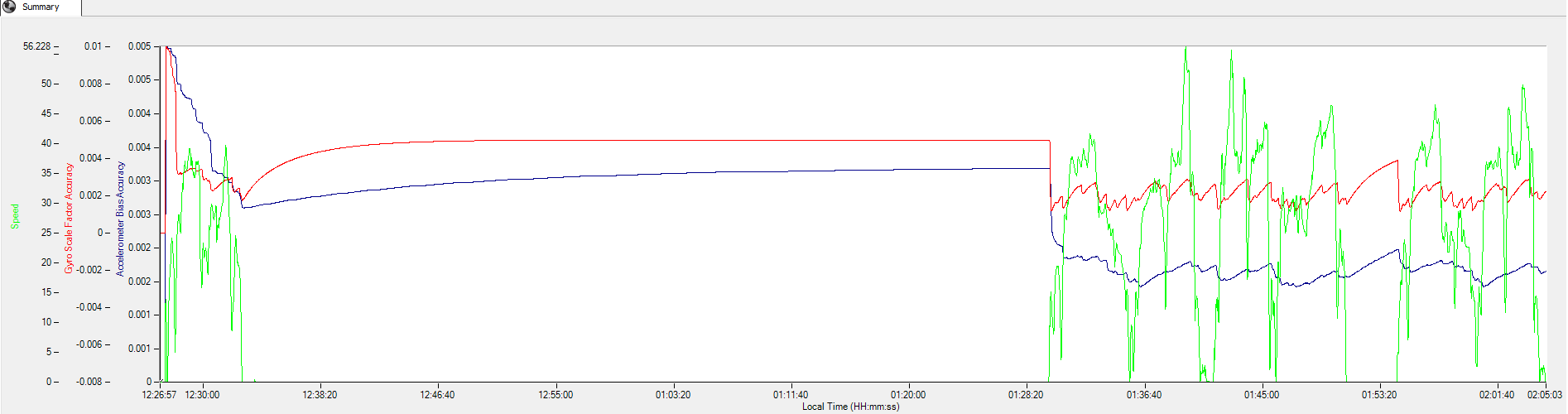
In the below example, the unit performed a quick warm up, during which the accuracy of the Accelerator Bias and Gyroscope Scale Factor measurements improved significantly. Then, as the vehicle was left stationary the accuracy of both measurements decreased dramatically. However, as soon as the vehicle started moving again, the Kalman filter was able to use the dynamic input to very quickly improve the accuracy of the measurements again.
With this in mind, a good workflow is to conduct your test and then perform any post-test actions such as uploading or analysing data immediately afterwards. This way, after these are complete, the drive back to the starting point will give the IMU sufficient input for it to be ready for another test straightaway.
Whilst NAVassist is designed to get the RT up to specified accuracy as quickly as possible, sometimes it is not possible to perform the required manoeuvres due to a lack of space or limitations on the vehicle itself. In this case, the performance can still be improved by simply supplying the unit with as much dynamic input as possible. The more dynamic input that the IMU can be provided with, the more accurate the data that will result.
For open road testing for example; if possible, the driver should drive along a variety of roads with left and right hand bends/turns and if possible perform a small number of sharp accelerations or emergency stops before formal testing commences.
Contact us for help with your device warm-up process.
Comments
0 comments
Article is closed for comments.