
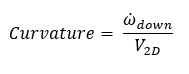
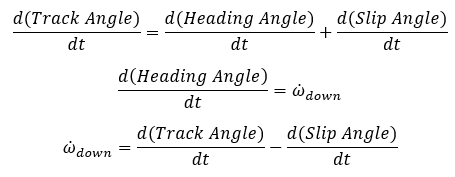
In OxTS systems curvature is calculated as by dividing the angular rate down by the 2D velocity.
Angular rate down is defined as the angular rate about the gravity vector, i.e down in the North, East, down Earth fixed frame. For more information on measurement frames see this article.
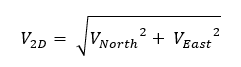
2D velocity is calculated as a vector sum of the velocity in the North and East directions.
For many use cases this will be what is often thought of as curvature. However, for some users this may not be aligned with the definition of curvature that they are used to.
Angular rate down is the rate of change of the vehicle's heading, with respect to time. This means that the curvature calculation presented above includes vehicle slip.
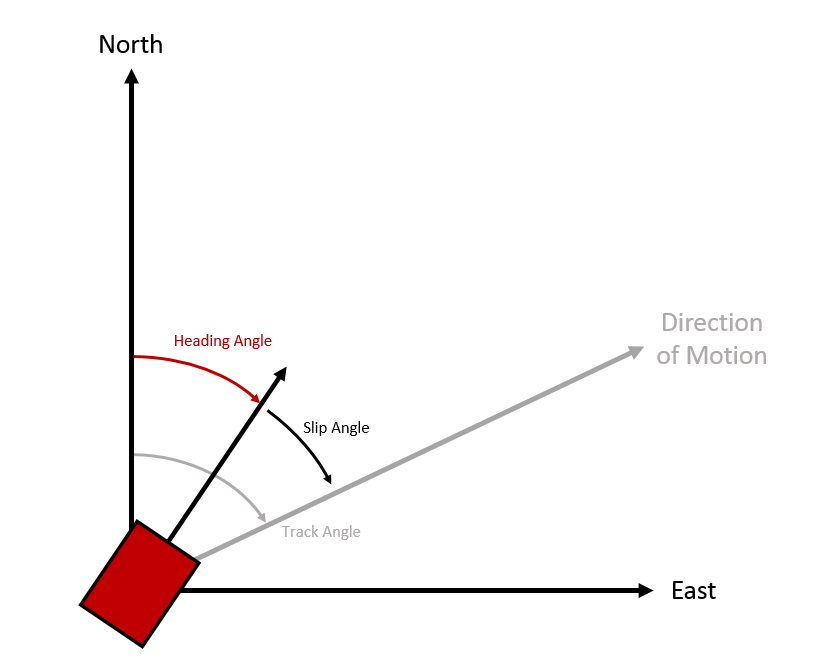
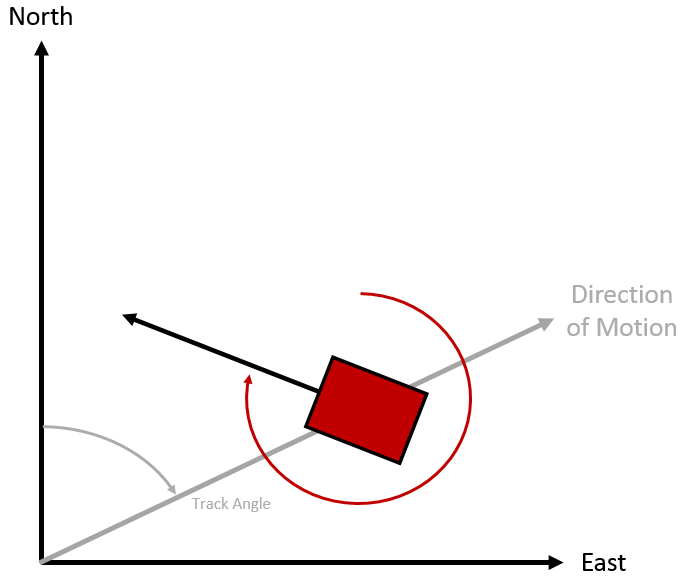
To some users curvature is the curvature of the path that the vehicle takes. A useful way to clarify this distinction is to think of a vehicle sliding on ice in a straight line spinning about the measurement point, with a varying angular rate. The curvature calculation defined above would vary but the curvature of the "path" of the measurement point actually has constant, infinite curvature.
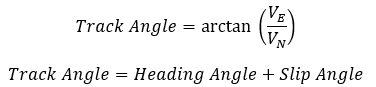
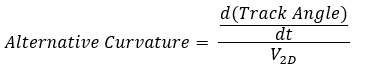
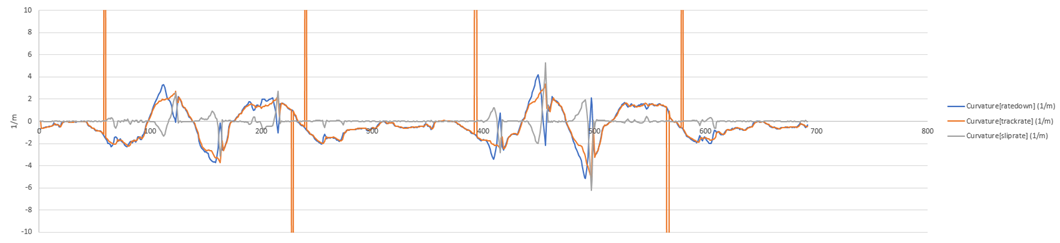
In order to calculate the curvature of the path of the vehicle users will have to post process their data sets. Creating an additional variable for the rate of change of track angle and dividing it by the 2D velocity of the unit.
Or by taking the lateral acceleration and dividing it by the forward velocity, squared.
Variation between the two methods can reach up to ~3 1/m depending on the amount of side slip generated.
Comments
0 comments
Please sign in to leave a comment.